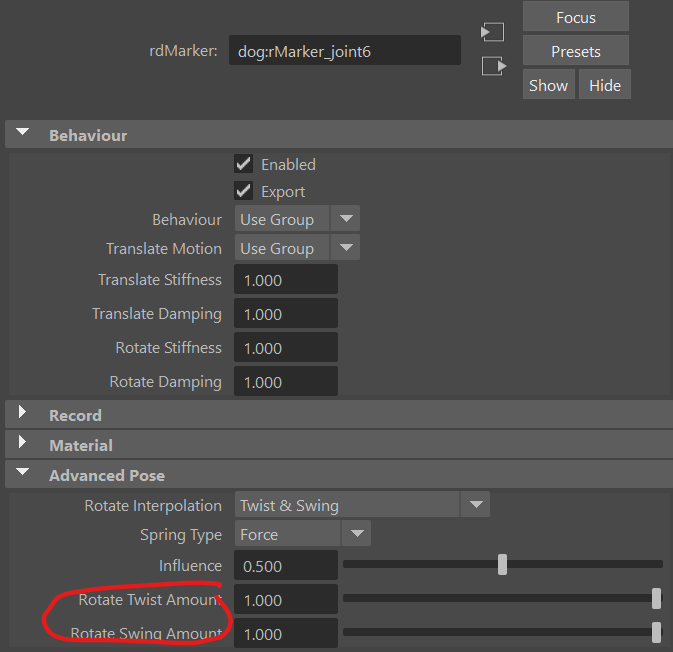
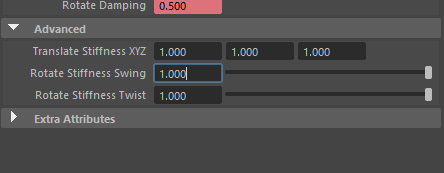
First problem im having with this is the twisting of the upper arm due to lack of stiffness, which is mandatory for this case. Another reason why i went with the high gravity, since that way the stiffness could be increased and you just had a dropping arm without the twist. Would be great if there could be a stiffness parameter for each axis…
Next problem is the arm colliding with the body, there is no impact effect. I know there is the bounce parameter and its also on default, which should give realistic results as it is. Am cautious increasing it after my last tests a while ago, since it made couple parts jump invinitely.
Lastly the arm behaviour when pulled by the pin constraint. Feels like a bit too less inertia of mass for my taste.
Another thing you can try depending on what your looking for is leaving stiffness equal across all axes, and adding a narrow limit with less stiffness so as to make the limit prevent rotation softly in the axis you need.
PS: I’ll edit the title too to make it searchable.
I can confirm that Rotate Twist Amount is completely ignored, keyframed or not. This is a bug, will be fixed in an upcoming release (a.k.a. Ragdoll 4.0)
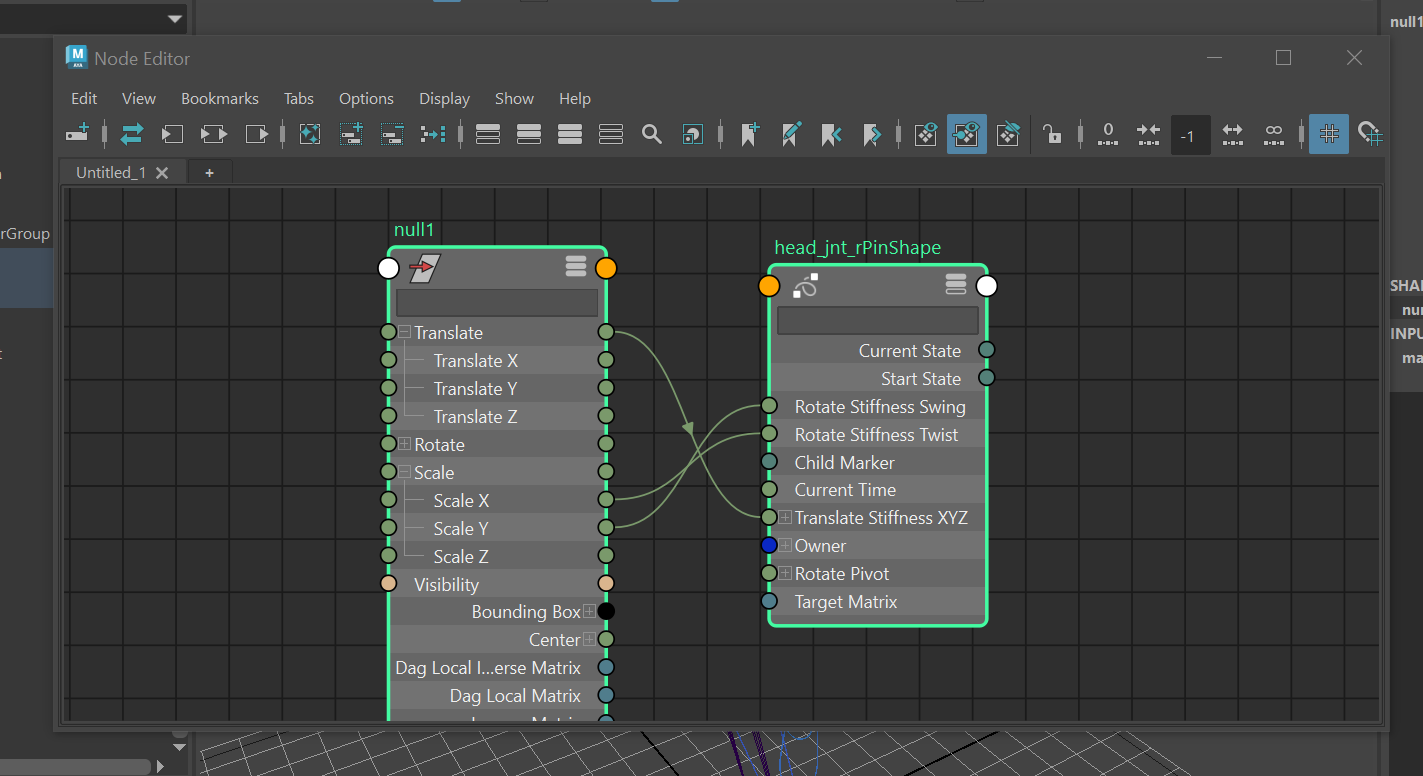
Sure, those can be animated with a little trickery. They are read on every frame, just the attributes won’t allow a direct connection to an animation curve. But if you connect something else, like an animation control, then they’ll animate.
It’s pretty rare for this to work though, I spotted it in the code. Generally if something cannot be animated it’s because their values are only being read on the start frame.
Apologies, but if its rarely working even with this trick then how to work with it in production where you need reliable tools?
Will this change to a animatable attribute in the future?
I meant it is rare to work on other attributes that are unkeyable, such as Enabled and Limit X etc. You would be able to connect to them in this same way, but they would not be read each frame.
This attribute will be made keyable in the next release.
After opening this thread and reading the solution to it, i had to take a break from ragdoll.
Thankfully user L.Tuu has asked the questions i had in mind and found out that its a bug in the engine, saving me from wasting my time to try it out myself.
Thanks
Hopefully it will be functional in the next update.