I’d say looking at real life is a good start, and I wouldn’t bother trying to think ahead until you’ve been there, done that. Expect to draw these joints, assign physics to them, and play around with the result at least 3-5 times before committing to anything. It needn’t take longer than an hour the first time, two hours next time and so on. Each time, you’ll get a greater and greater understanding of the process and better able to think ahead each time.
For starters, what I expect you’ll find is that there are ways to model you character that make setting up these joints and axes easier, primarily related to IK, but not because you need IK everywhere, but because IK is the most sensitive to clean and consistent axes and is a good litmus test for what makes a good rig good.
Primarily, to have limbs be (1) planar and (2) convex.
|
Feature |
Description |
Why? |
| 1. |
Planar |
For limbs to lie flat against a plane |
To avoid the need to counter-animate |
| 2. |
Convex |
For limbs to have a slight bend; avoid straight lines, e.g. a fully-extended knee |
To better facilitate IK |
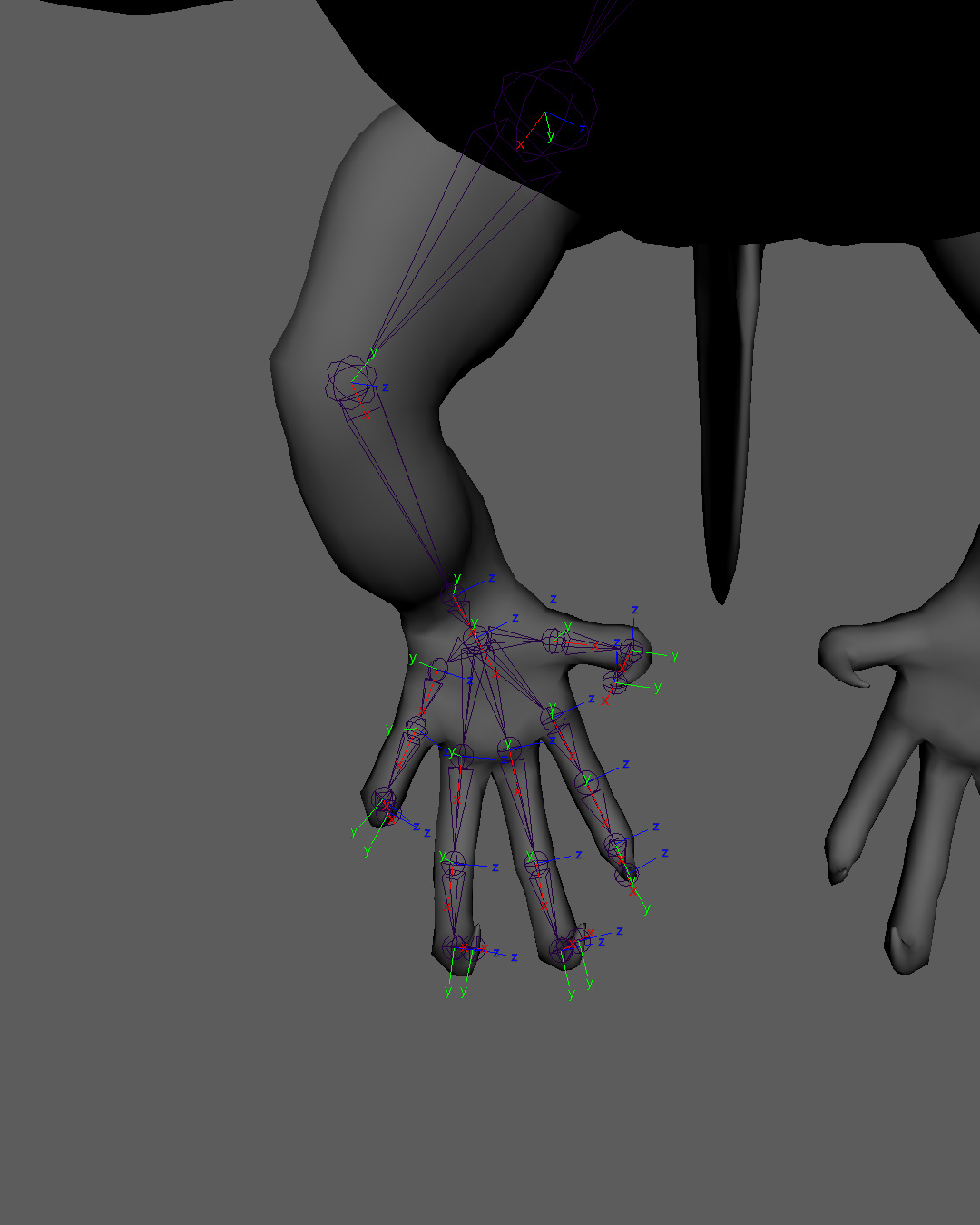
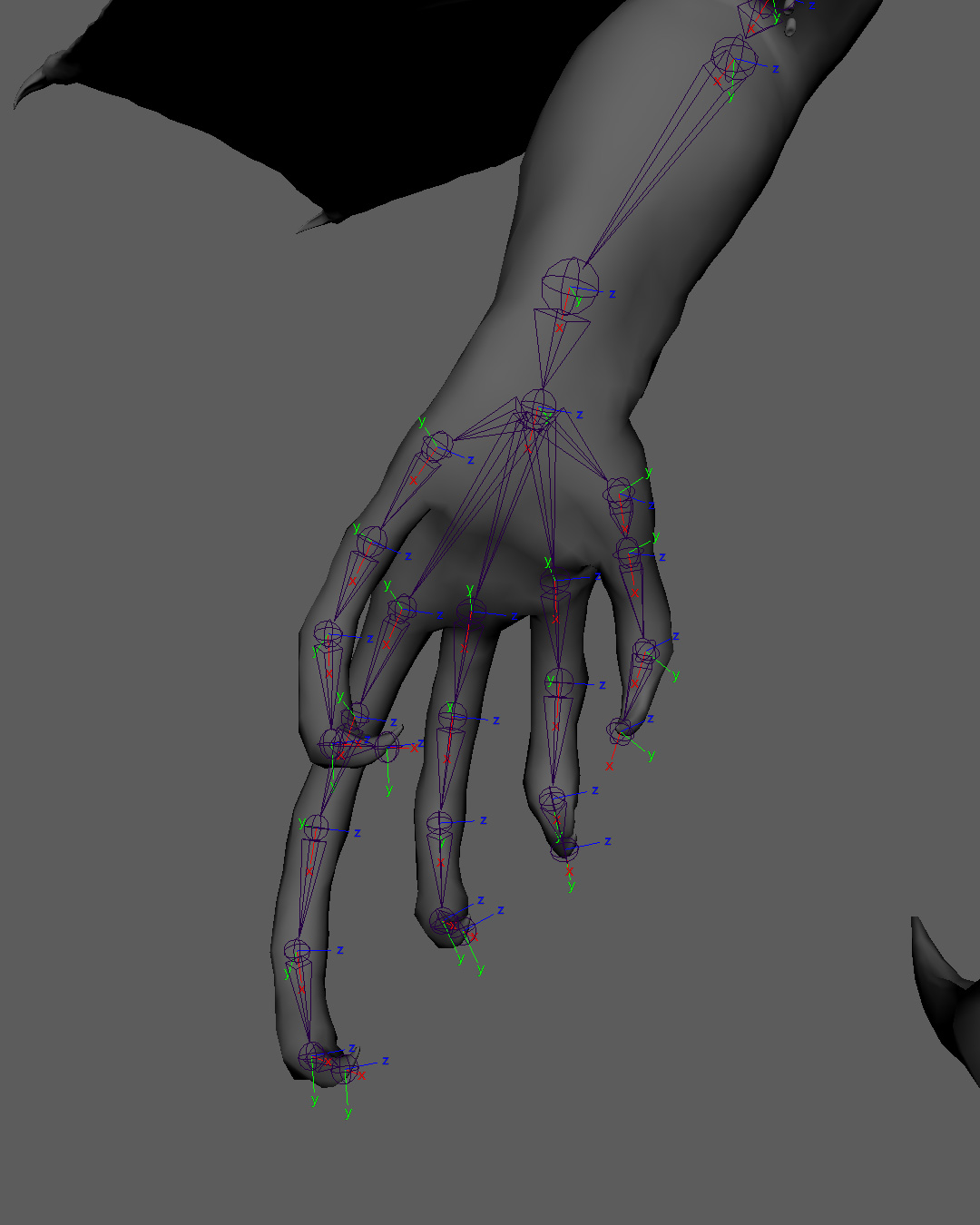
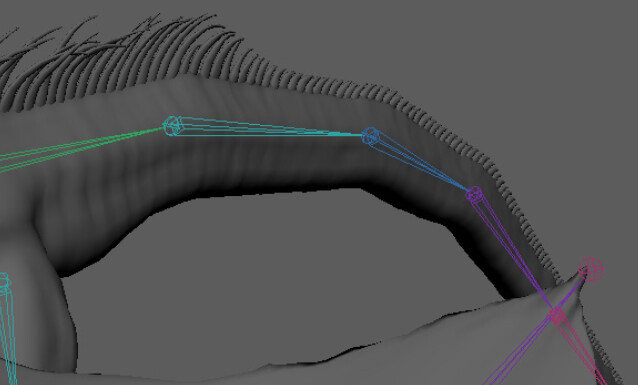
Planar Limbs
The above is an example of a typical model where a limb, in this case the toe, is non-planar. The resulting joints can’t be folded in on themselves without also animating a second and (sometimes third) axis.
Your best bet is to model each limb along a plane, and apply the curvature using your controls/joints instead.
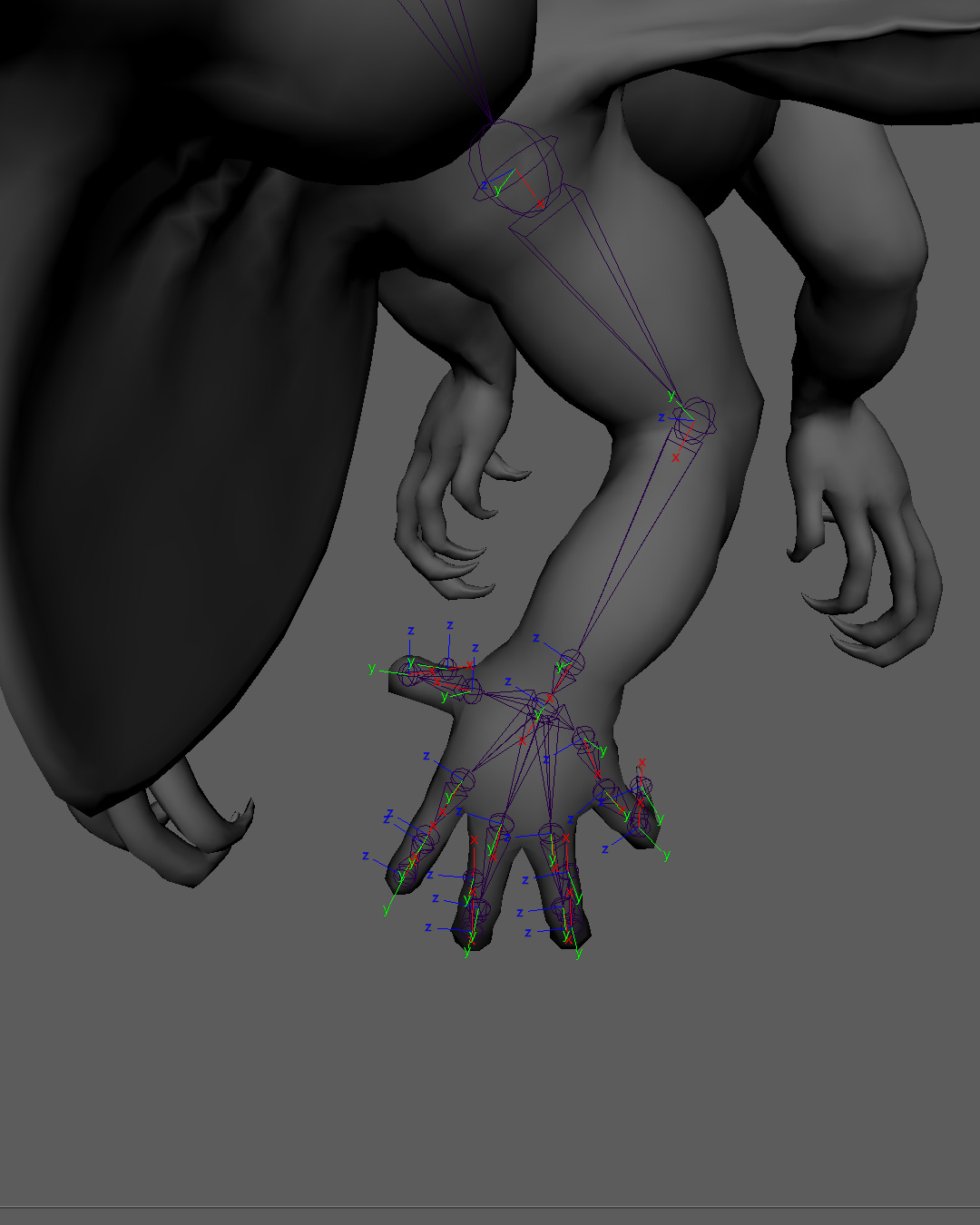
There are tons of ways to get your joints fitted along this plane, here’s one of them.
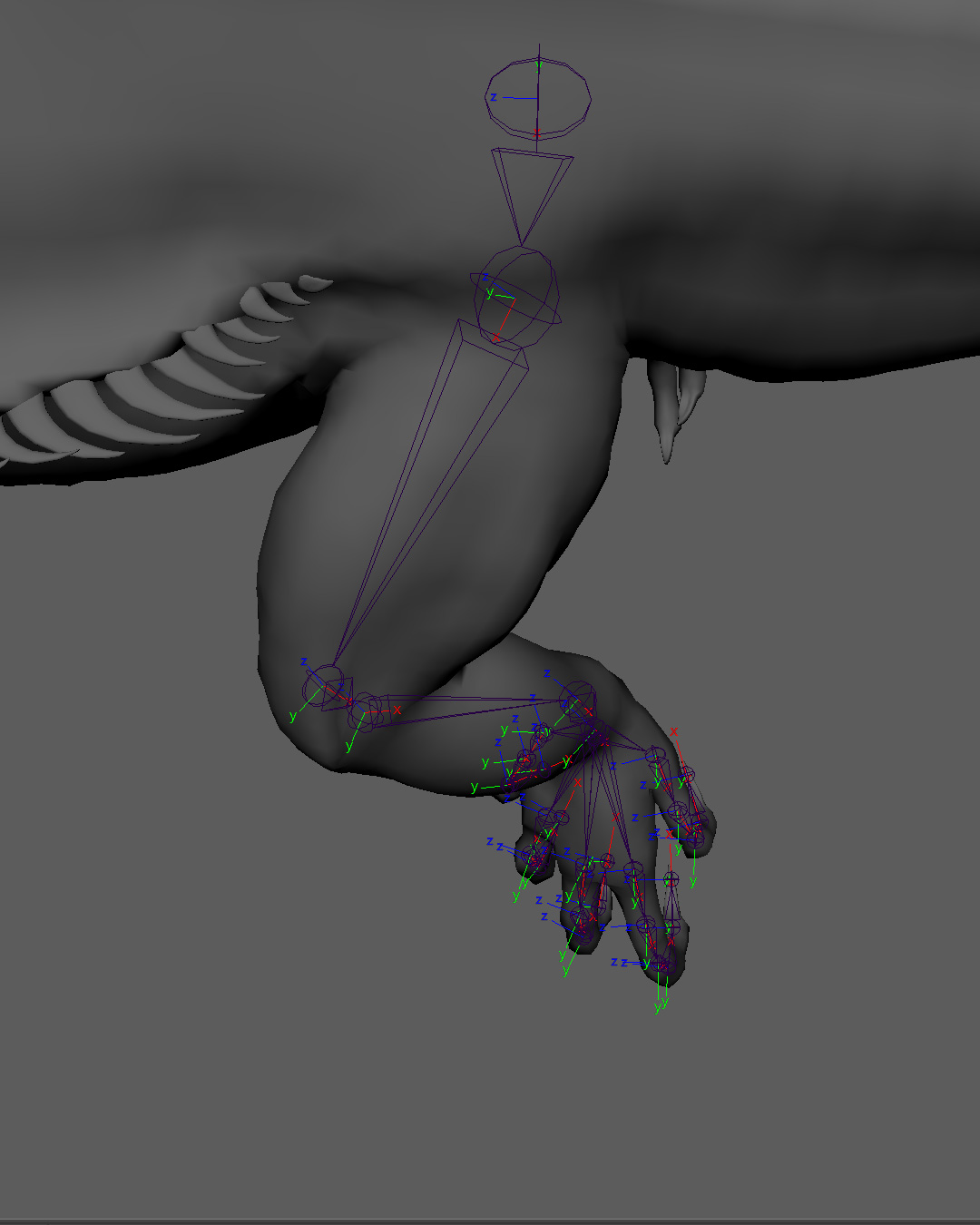
Convex Limbs
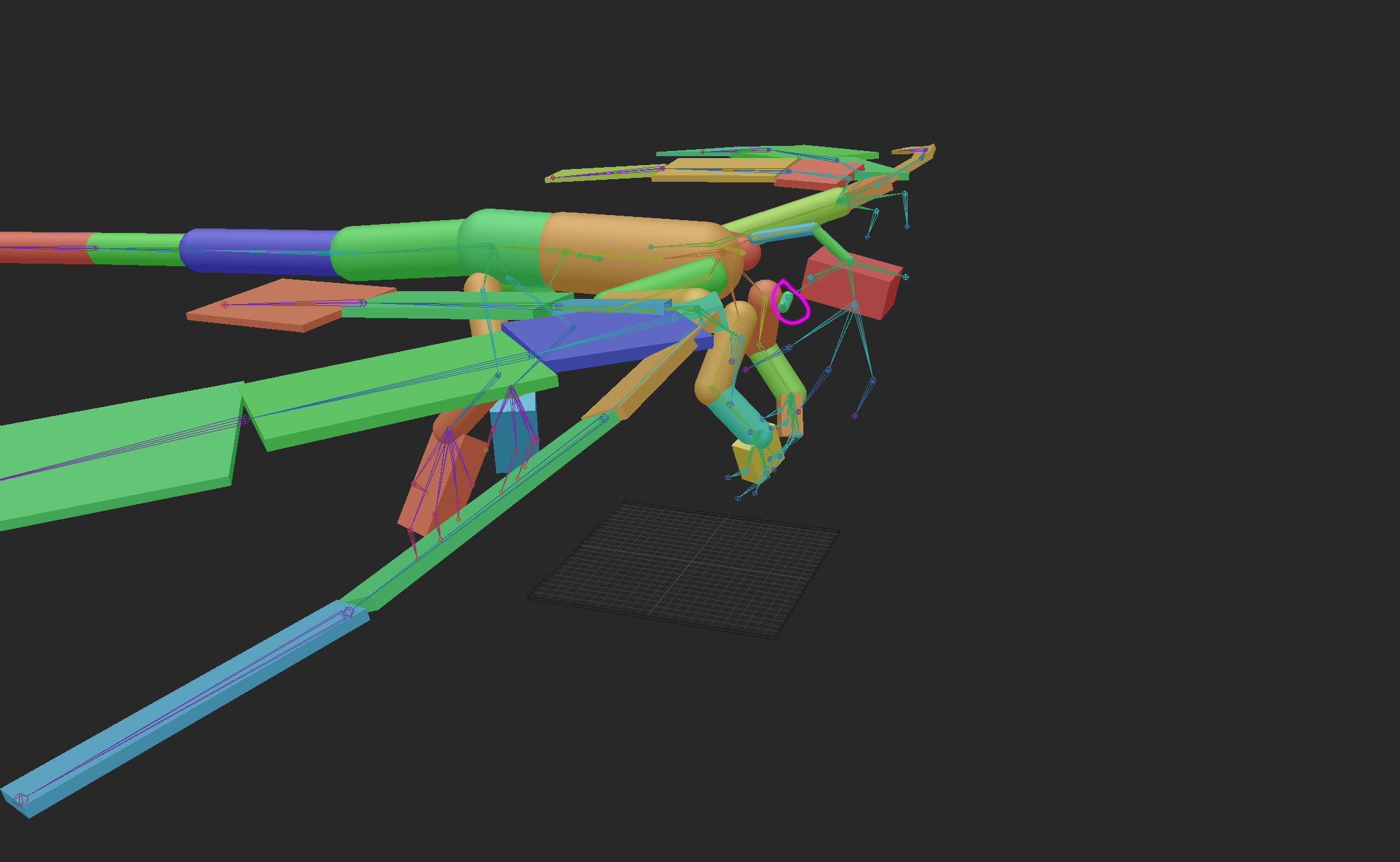
The next thing to look out for is when your limbs either have no curvature, multiple curvatures, or curvature in a direction it isn’t supposed to continue bending in.
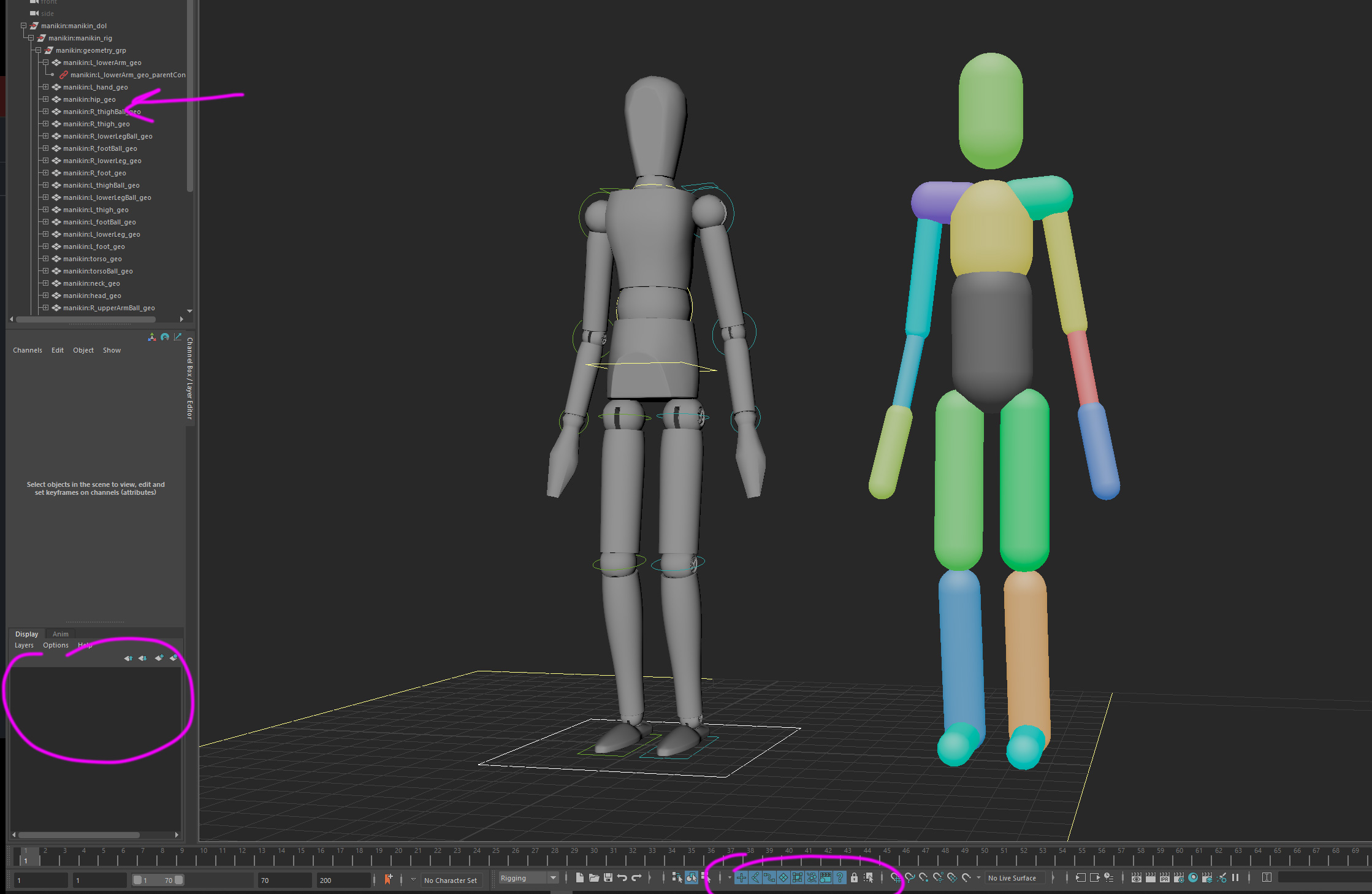
The human knee is a good example, because we can bend our knees slightly backwards, and do so most of the time in a natural stance pose. This is the worst possible pose to rig, because once you assign IK it will assume you intend to continue bend in the direction a limb is already bending - backwards.
Here’s another example, where the knee is bent slightly outwards, also perfectly natural and anatomical, but notice how IK will assume you want it to continue bending outward.
You’d think that the “pole vector” constraint is a remedy for this, but there are 2 reasons it is not.
- It applies unnecessary rotation to the limb to “fix” the bad direction
- An underlying issue is that our joints are not planar, see above for why that’s important
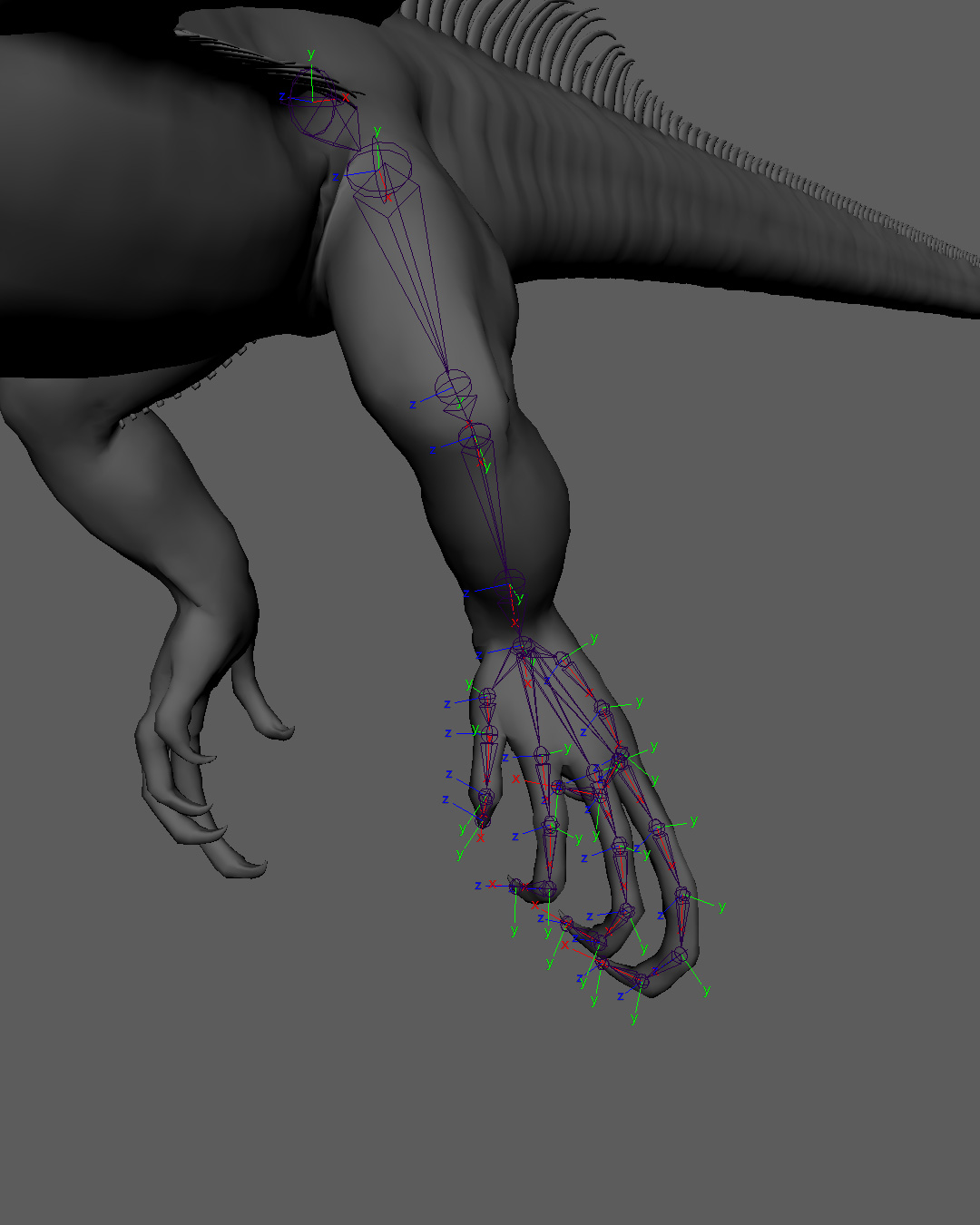
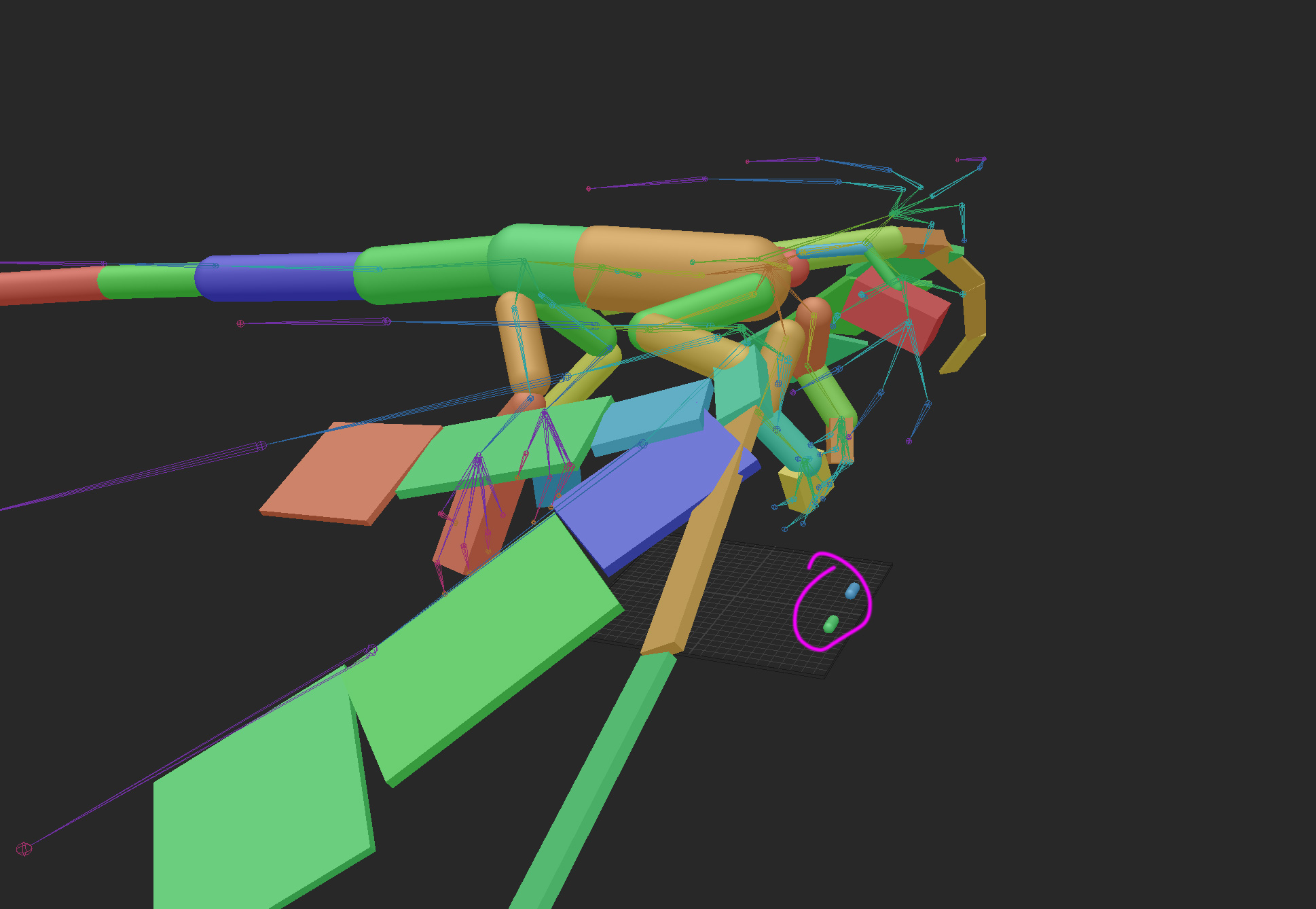
So in your model, your best bet is to introduce that slight bend in the direction you expect a limb to continue bending.
But we’re not quite done yet. You’ll notice that although we do get slightly closer to bending in the right direction, notice how the foot is spinning out of control?
Let’s bring out our trusty plane.
But alas, we’re still not done yet, because even though we’ve modeled our joints along a perfect plane, Maya per default will assume that your global Y axis is facing in the direction of the knee, which is not true.
So we’ll bring out the old Orient Joints dialog and fiddle with the settings.
And there you have it; everything moving along a flat plane. This is how you want each of your limbs to behave.
Summary
As you can see, your model is still anatomically correct, but also technically possible to rig. This isn’t unique to Maya, but to animation in general. Real animals and humans all have a slight bend to every limb, so your model will have to end up in a less natural pose if is to survive the rigging process. It’s during animation that you bring back that naturalness and retain control over your poses.
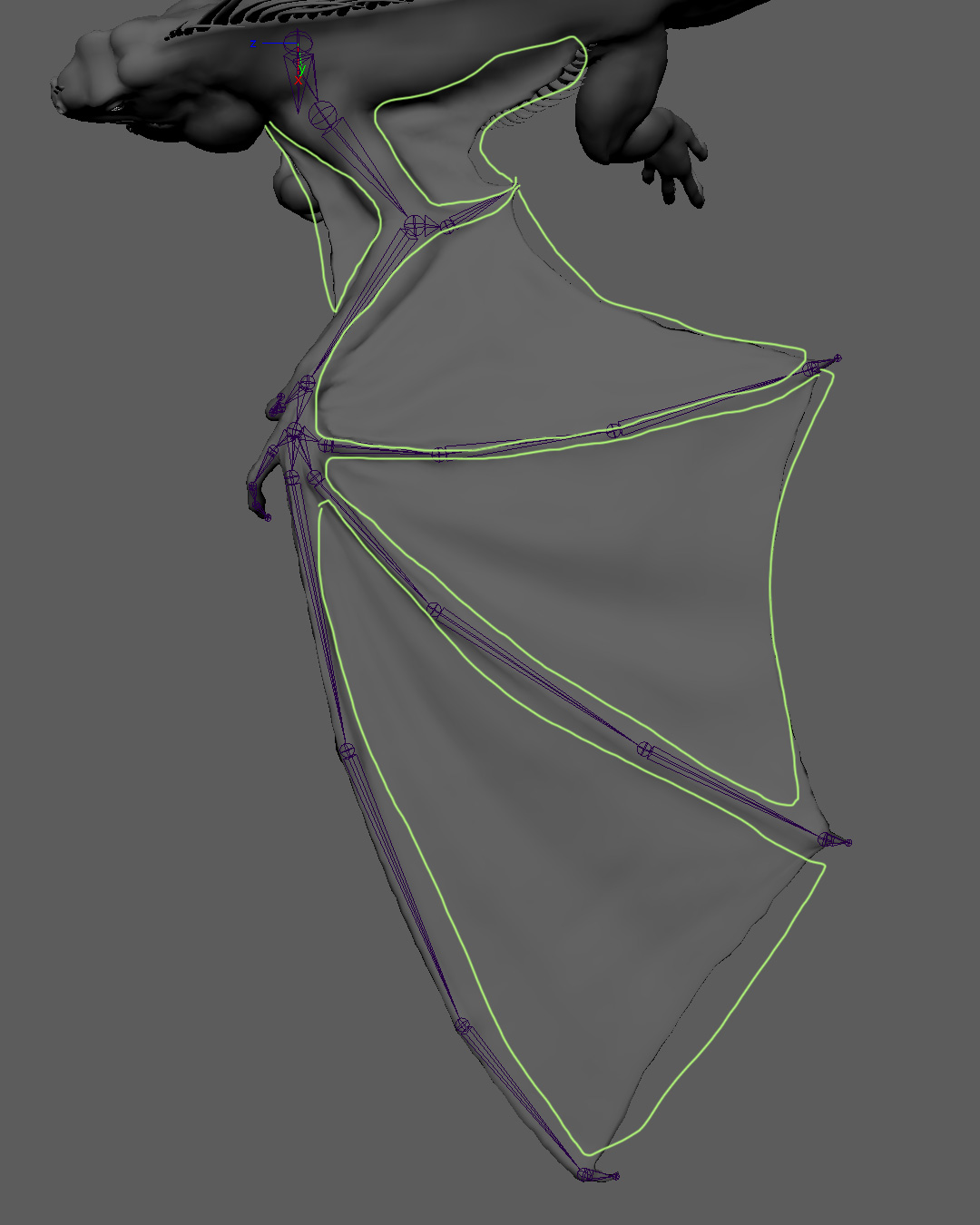
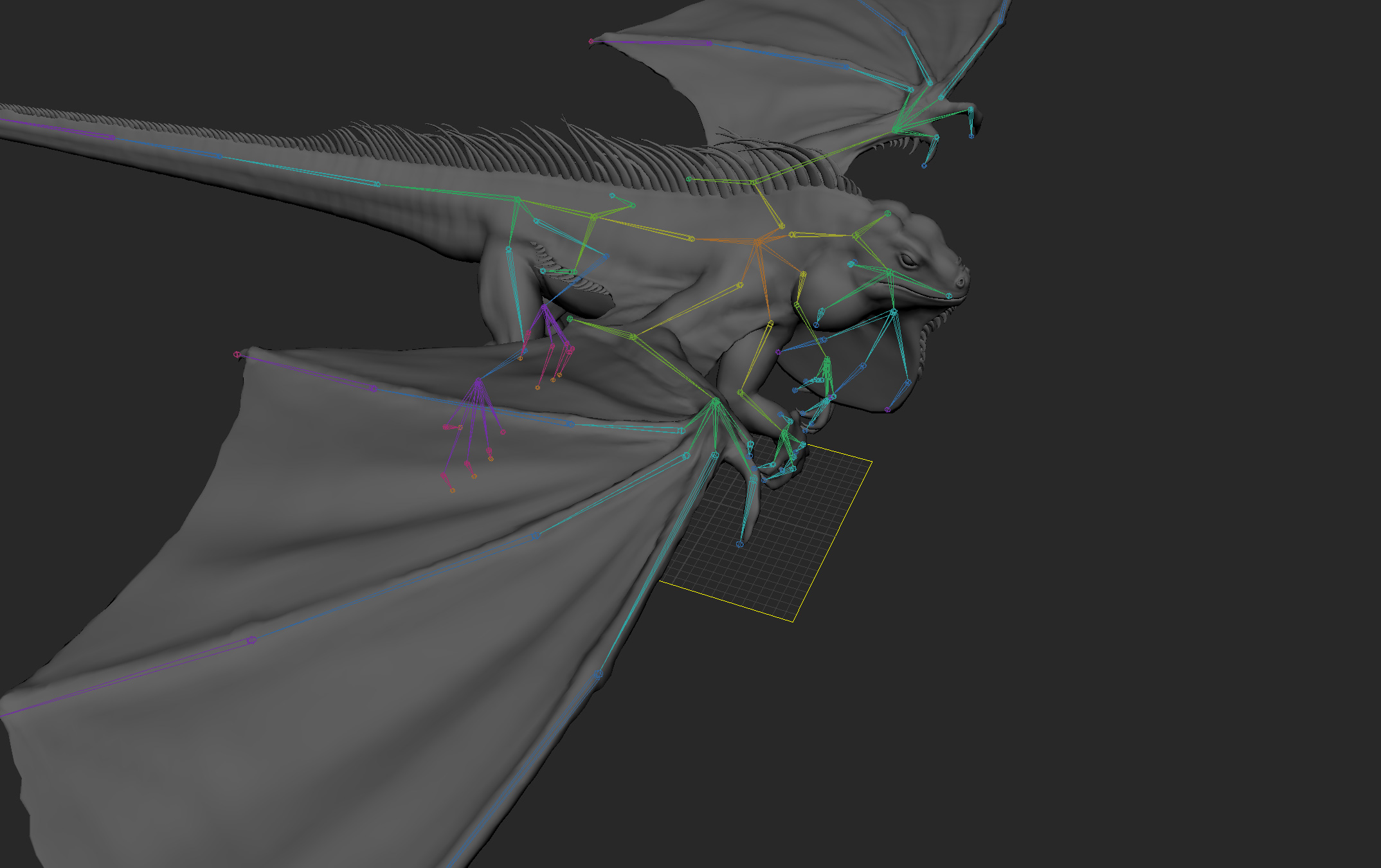
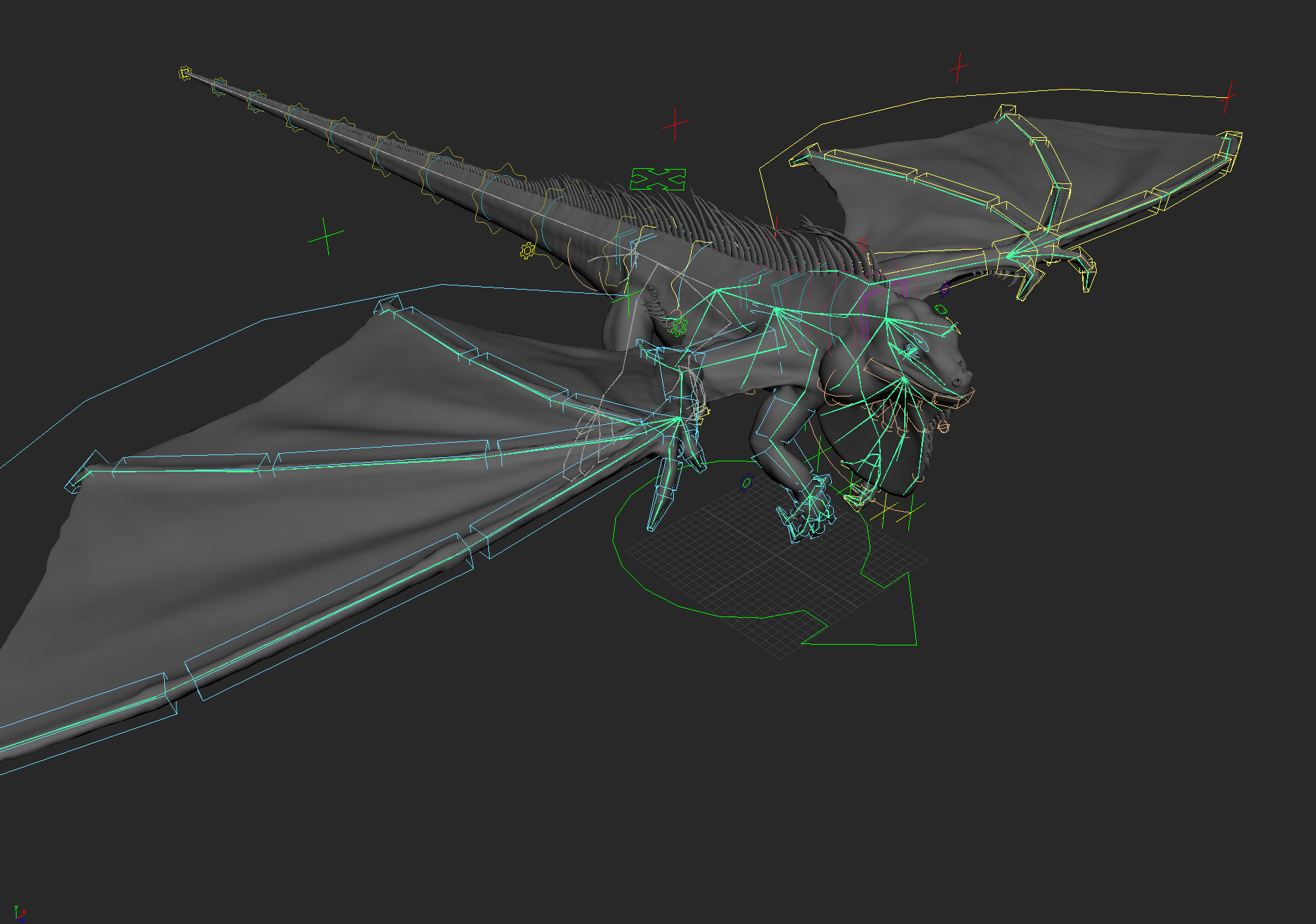
I would tackle one challenge at a time. Folding a wing is something even the most seasoned riggers struggle with. Try animating the shots of your short film that doesn’t rely on folding first, and revisit it once you have more experience.
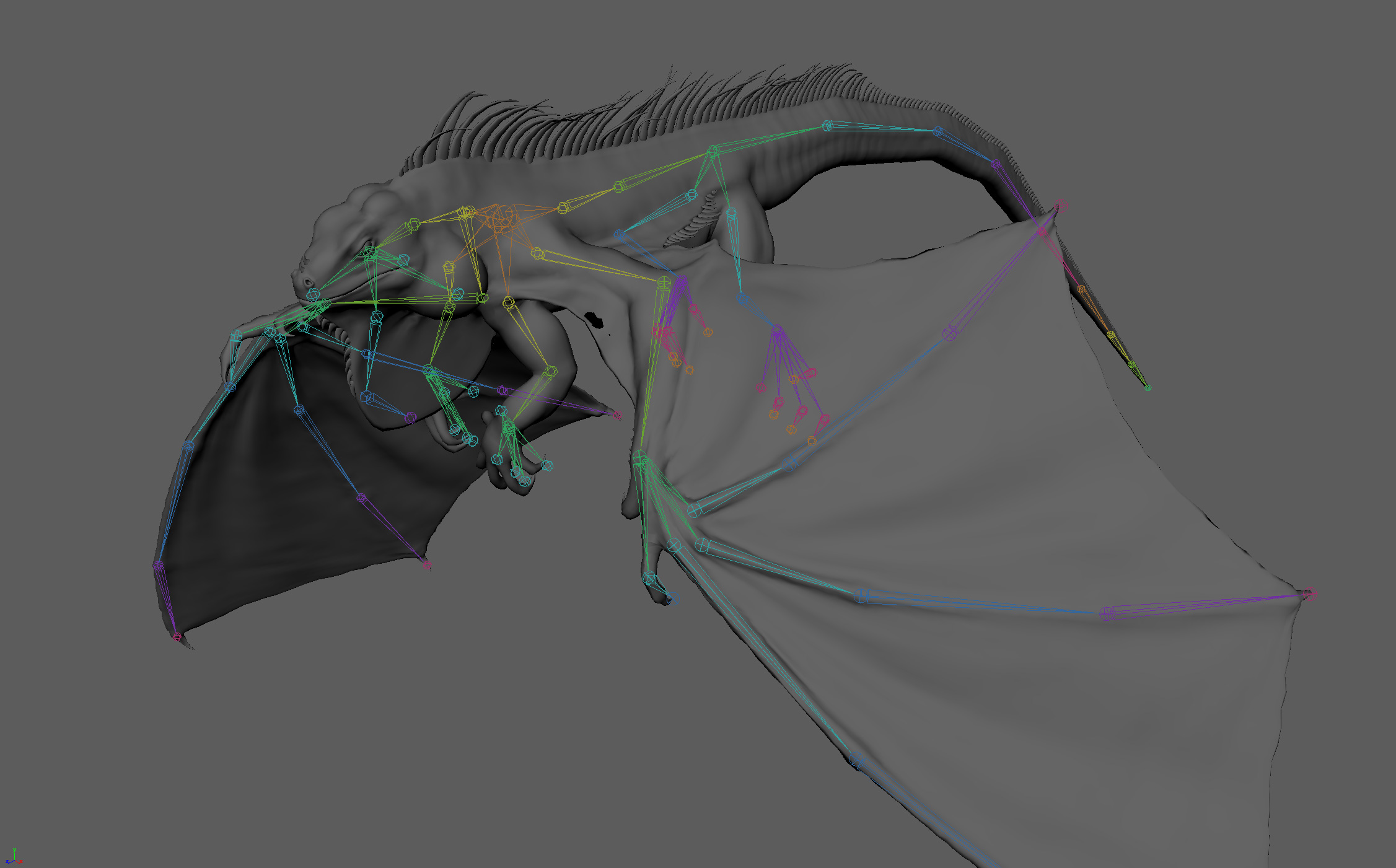
This is totally doable, and I think now that you know more about how to rig just one limb you’ll realise the amount of work involved in rigging 10-20 toes; each of which requires similar treatment. Not to mention that simulating them also multiplies the amount of work required. Remember: each toe is as complex as a leg or an arm.
I would set your character up a few times without toes first, and approach toes once you’ve got some semblance of a workflow.