Each aircraft is parented to a root marker that’s kinematic
All the aircraft markers are in a group
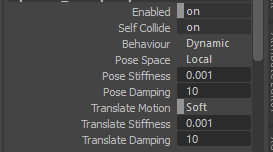
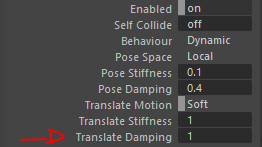
The low stiffness and high Damping get that overlappy/loose feel. Translate Motion : Soft this is so the aircraft can move around with animation and be effected by a turbulence field .
I take it a dog-fight would use Constraints with really loose settings… Right?
If so, besides going one-by-one with these constraints, could you create some sort of detection system to just “aim” itself at the closest plane?? Do we have such techniques?!
Was fun to play with, Hmmm for a dog-fight I’ll have a think I guess you could pull one with a constraint or have a newton field pulling the other plane along…
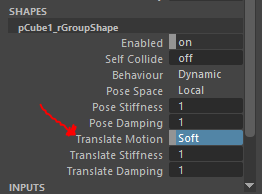
I’m trying to recreate this squadron setup and clearly missing a few things. I’ve got my plane markers parented to a ‘root’ sphere with the markers in an rGroup using the settings you’ve got here. However, I’m finding that with the group’s pose space set to ‘Local’, the planes just plummet. If I set it to ‘World’, they do follow the root, but if I give the root any lateral translation, the planes just crab from side to side behind it.
I imaging I’m missing something obvious. I have only had one coffee today so there’s that…
Yep, I’ve got translation set to soft - I’m using the exact settings you posted here. For some reason, with pose space set to local, my planes just plummet.
You’re using a regular Maya constraint to parent them to the ‘root’, right?
I don’t know what kind of idiot I’m being, but it appears to be rather a large one.
Just to clarify, these were all separately created markers, right? As in ‘assign’ as apposed to ‘assign and connect’?
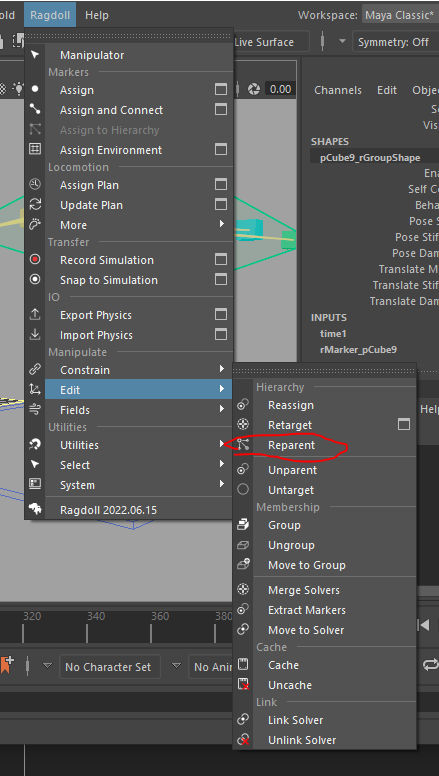
When I do the : select parent marker > shift+select child marker > reparent, I get a message pop-up saying : “Selection problem : Select a child marker along with the marker to make the new parent.”
You could either do it all as just assign or select the root then the child for each one … Assign and connect is essentially making the reparent connection and parenting them together.
For this select the child first , then shift select the parent and you should be good to go
First of all, thank you both for always getting back so promptly. And apologies for being so needy on this one.
Ok, I can get the reparenting to work but not in manipulator mode. Just picking the elements in regular maya gets me there. Now, the planes do follow… a bit… then they stop…
Looks like the Translate Damping might be too high or the air density on the solver might be too high or a combination of both
try a Translate Damping of 0.5 or something below 1
Cheers Jason. It’s still misbehaving I’m afraid. There might be some kind of scene scale discrepancy or something. I’m gonna keep mucking about with settings and will report back if I find what’s going on. Cheers guys!
Found it! Need to parent the planes under the root, they want to keep their relative position, so when the root moves away from them they try to compensate and keep that distance.
Ahh, see I thought once you’d parented / re-parented the markers, that was that. Wonderful. Thanks so much, Jason! I’ll keep fiddling to try and get them feeling less crabby now. That stiffness / damping sweet spot is in there somewhere!