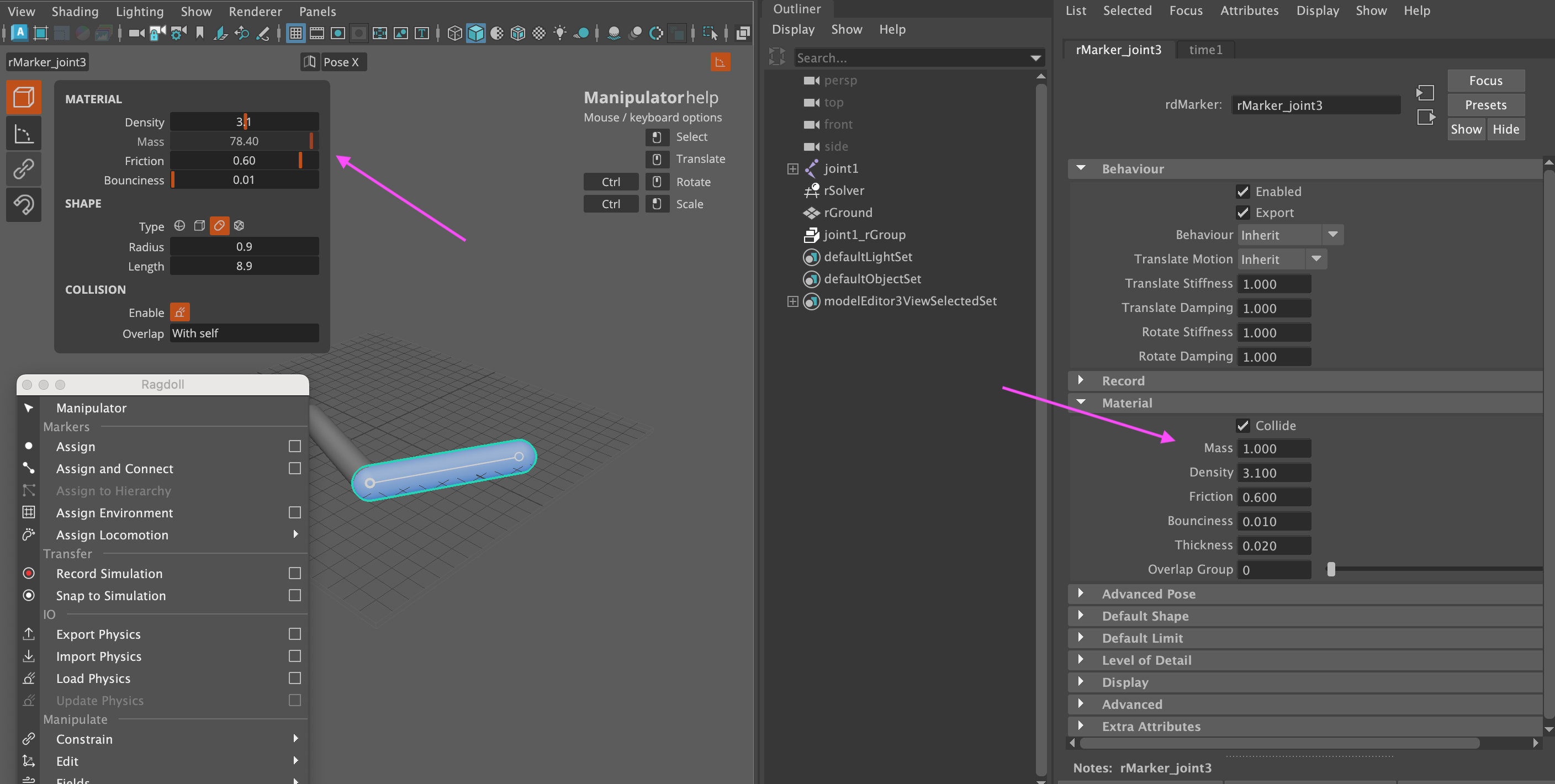
2.According to the instructions, we can change the center of mass setting. But how to visualize this point. There is a Mass menu in the Display attribute, but nothing shows in the viewport.
Every Marker has mass and mass can either be set directly, via the attribute you found, or indirectly via the Density attribute. When a Marker has a Density, then the Mass attribute is automatically computed, which is what you see in the left-hand side there. With Density = 0then theMass` can be set by hand.
There’s an attribute to display center of masses in the Attribute Editor of the solver, under the Display tab. It will become visible after the first frame of the simulation, which is when the physics has been initialised and is ready to go.
If density is zero, it works with setting in maya attribute. If densisty is different from zero then automatic calculation works, bypassing Maya mass attributes. I understand correctly.
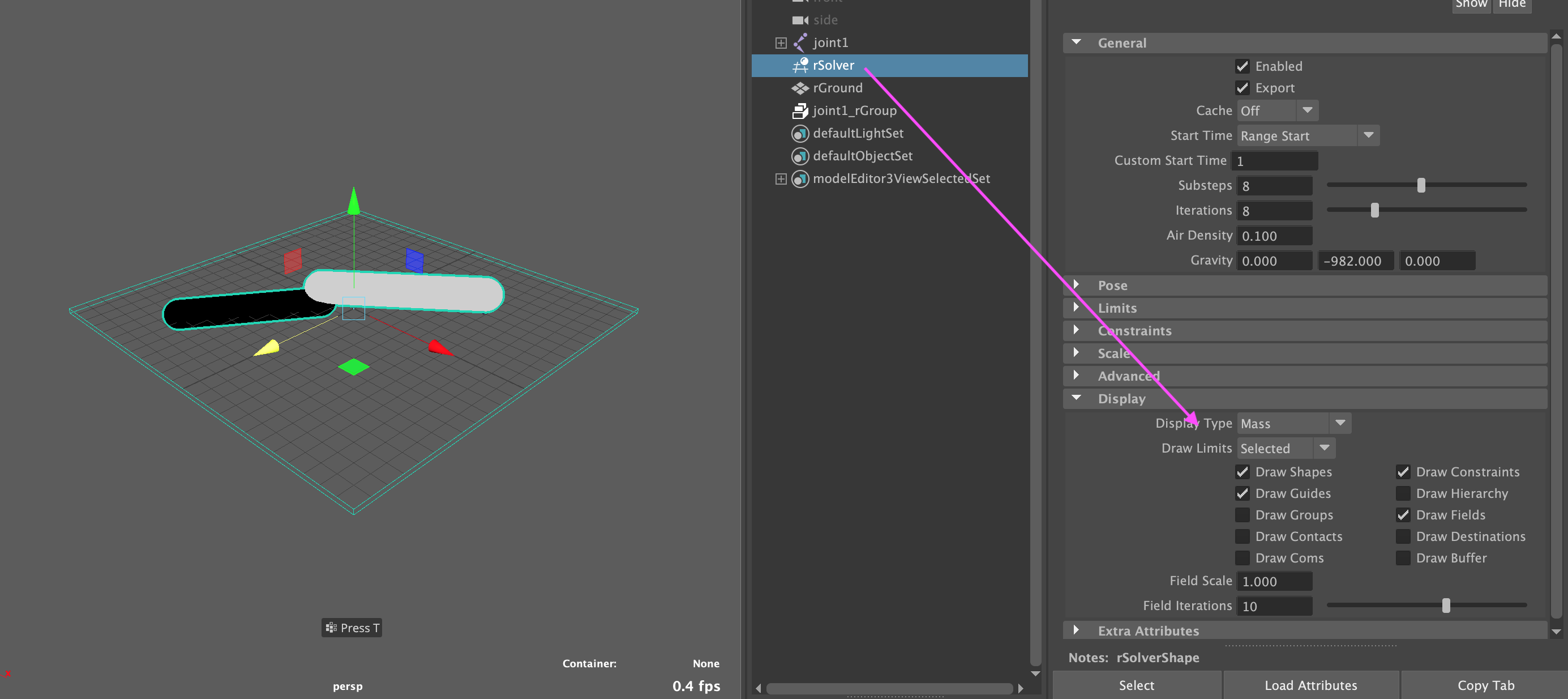
2.In the solver display, I selected mass. A few frames of the simulation. But I still can’t see the center-of-mass marker. The bones have changed color, which means this color?
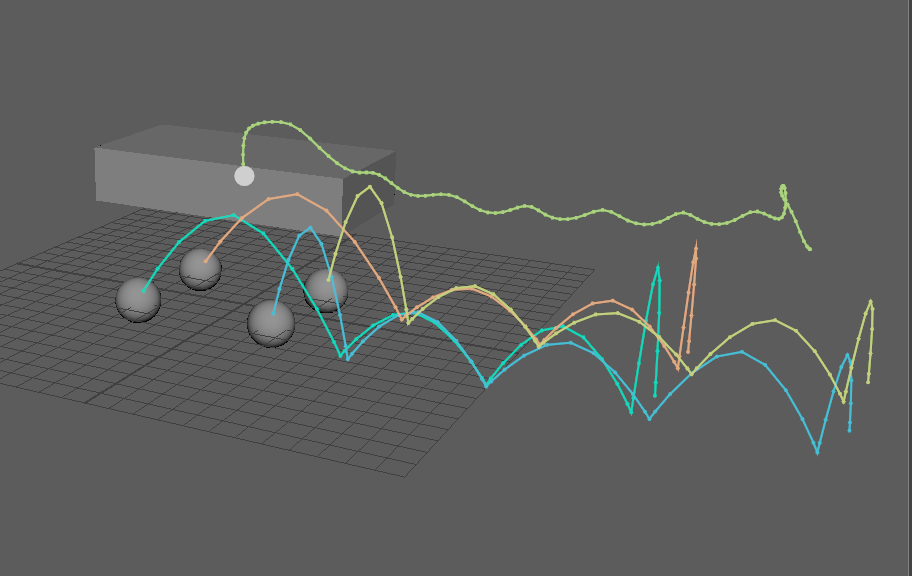
Simple test cube as body, balls as legs.
A. Why don’t the legs move alternately, I know I can set it in the editor, but can locomotion automatically generate alternate typical movement.
B. Why does the locomotion turn at the end.
C. Can I enter an individual way of movement e.g. for one leg which will automatically be transferred to the other legs.
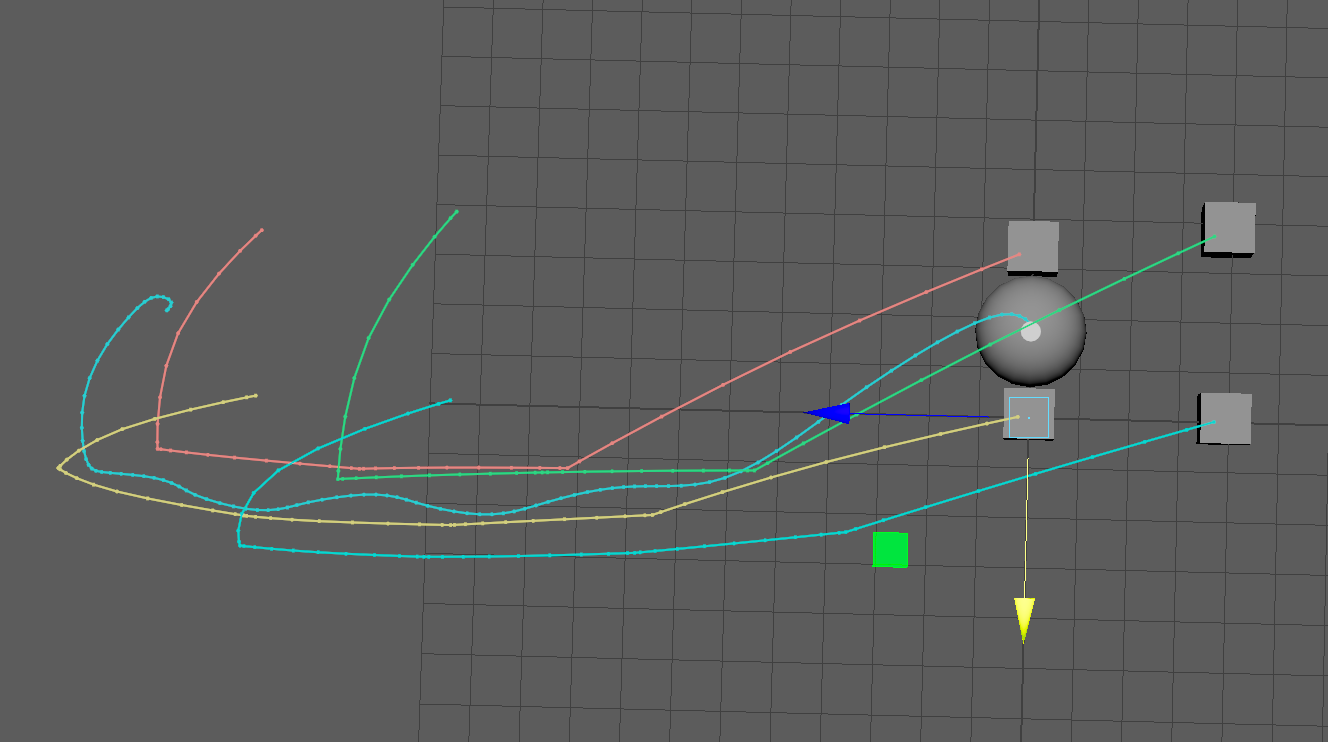
A similar example. The object does not move in a straight line. At the beginning it takes a step sideways and and at the end it also takes a step sideways. The documentation is not complete, I mean it is difficult to understand some dependencies. The object does not move the way you are going, in the documentation there is no indication of what this movement depends on, on what parameters in my model.
Sorry for the delayed response, we’re all off on holiday at the moment.
The option you’ve selected visualises Mass alright, however not the “center” of mass. For that, there is a checkbox below called Draw Coms, where “com” means “Center Of Mass”. It was shortened to fit in the Attribute Editor.
Once ticked, on restarting the simulation, you should see a little dot appear around the center of each Marker.
Can you rephrase the question? I don’t think I understand, what do you mean “alternatively”? Do they not more at all?
Can you include a video perhaps, so we can see what it looks like? I can’t see a turn in your screenshot. If you edit the targets, are you able to rotate them to turn in a different direction?
I’m not sure I understand here either; do you mean you want to edit the way only one of the legs move, and somehow the other legs should copy that?
Locomotion will try and find the most optimal way for the body and feet to reach the end destination, based on the starting position.In this case, it looks like the body is very close to the front two feet, with one of the hindlegs being spaced asymmetrically. Try editing the start and ending positions of body and feet to get different paths, along with the steps each foot is taking to get there.
To provide “complete” documentation is going to be challenging. We are also still discovering new ways to use this technology. The core ingredients are there; a step sequence, start + end targets and allowed range of motion for each foot. The rest is tweaks. So do share your journey here, others will surely enjoy following along and learning alongside you!