I’m creating multiple posts to discuss different issues I encountered during my tests today, as each pertains to varied aspects.
I’m having difficulty understanding locomotion. My challenges are further complicated as I’m attempting to simulate an uneven walk for a mech with a missing limb.
Did I overlook a tutorial that covers adjusting locomotion speed, stride length, and duration? I know we can set a path with midpoints and rotations, but I’m unclear on editing straight-line locomotion to adjust its speed, length, duration or gait size.
I saw there are several live streams showcasing various facets of locomotion, but some of the content is scattered and covers numerous topics without a clear sequence. This makes it challenging to grasp these specific aspects even if they’re perhaps mentioned within the live stream recordings.
Additionally, for my specific use case the system seems to be placing one of the limbs on the incorrect side of the mech, where a limb should be absent. Is there a setting to correct this by forcing it to switch sides or would this be a limitation?
One post per topic is perfect, thanks for being organised!
It would be much easier to understand what you are seeing if we could actually see it; either as a screenshot, video or even illustration. If your assets are proprietary, then a mockup with boxes and spheres would go a long way, since the workflow is identical regardless of rig.
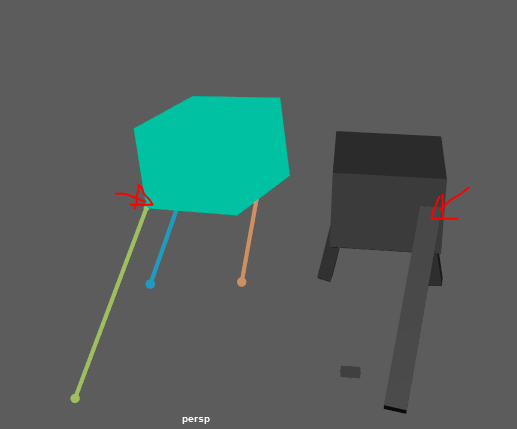
Thank you for the resources; I’ve checked out both the masterclass and the documentation. My assets are indeed proprietary, so I’ve created a simplified cube-based mockup to illustrate the issue with the leg placement. In my setup, the locomotion appears to attach the back leg to the left side, while my actual rig’s setup should have it on the right. I assume this discrepancy is affecting the locomotion calculations. Is there a way to adjust settings to correct this?
My rig also features additional front limbs, but they’re paired, so I’ve simplified the representation to focus on the core issue.
As for adjusting speed, gait, and distance, my current setup results in small, rapid steps. I’d like to extend the duration, slow down the movement, and increase step size over the same distance. I did find some insights in a recent forum post and caught a few hints in the masterclass video that might help me figure this out. However, given that the information is scattered, a targeted tutorial focusing on these specific aspects of distance, duration, and stride could benefit the community greatly.
Aha, yes I see. It actually does not; the line between foot and body is visual only and has no bearing on the simulation. In this solver, the leg itself has no effect, only the body and foot, so this can safely be ignored. What does matter are the limits within which the foot can move, since with a root higher up on the character it is likely able to move at a greater horizontal distance. But, without seeing a more detailed leg, it’s hard to say for sure. The goal is to capture the rig leg movement inside of this box.
Ok, this should be doable. The more specific you can be about what you are looking for, the quicker and more relevant of a tutorial we’ll be able to make. If you can continue using your box character to demonstrate what you see at the moment, and perhaps illustrate via YouTube or any video or even illustration what you are looking for, I could quickly put something together for you.
Thank you for your quick and detailed response! I really appreciate your willingness to create a tutorial that addresses my specific questions and is directly applicable to my problem.
My immediate need to understand locomotion better led me to keyframe a solution for my current project tests. While I’d love to contribute to a tailored tutorial, my schedule didn’t allow me to produce detailed demonstrations with my box character in time, though if I get a chance in the next few weeks I will try to upload something for some future similar cases.
That said, I still believe that a comprehensive tutorial focusing on general aspects of locomotion—like adjusting speed, gait, and distance—would greatly benefit not just me, but the wider community as well. A more generalized guide would offer a foundational understanding that could be applied to a variety of projects.
Could it be possible to steer a tutorial in that direction? I think that would offer the most utility to users who find themselves with similar questions, regardless of the specifics of their project.
Thank you for considering this approach. I look forward to your thoughts.