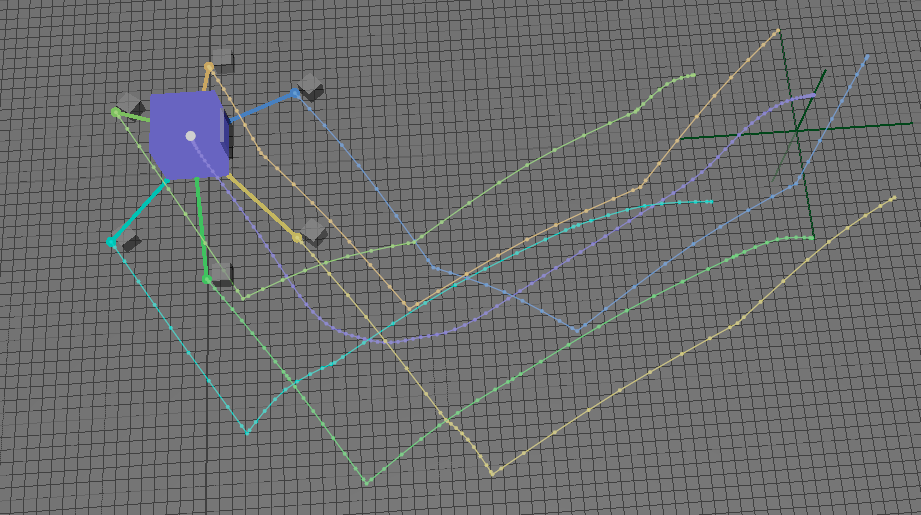
Hi, I’ve been having some trouble with locomotion I’m not sure if there are any known issues with it but one thing I’m noticing is on this six-legged example when I try to set a straight trajectory from the start pose to the locator, regardless of how I do my step sequence by the time I add steps to the last leg I end up with a strange side deviation on the trajectory. There is no rotation between the start and end, the steps are all very regular and alternated, so it should be a straightforward walk, yet I end up with this result every time.
Additionally, for some reason, it worked on some earlier tests but I would get crashes when trying to use plan to animation. I saved my scene before trying, but when I reopened it would be as if the whole thing got corrupted and gives me error messages when I try again. I ended up having to delete everything and start from scratch a few time and always ran into similar issues. Then eventually I also ran into the wonky trajectory issues.
This is what shows up in the script editor:
from locomotion import interactive as ri
ri.plan_to_animation()
# Warning: ragdoll.format_exception_wrapper() - Traceback (most recent call last):
# File "C:\Users\Humanoide\Documents\maya\modules\Locomotion-2023_11_20\scripts\locomotion\interactive.py", line 145, in format_exception_wrapper
# return func(*args, **kwargs)
# File "C:\Users\Humanoide\Documents\maya\modules\Locomotion-2023_11_20\scripts\locomotion\interactive.py", line 862, in plan_to_animation
# start, end, dsts = recording.plans_to_animation(plans)
# File "C:\Users\Humanoide\Documents\maya\modules\Locomotion-2023_11_20\scripts\locomotion\internal.py", line 507, in _undo_chunk
# return func(*args, **kwargs)
# File "C:\Users\Humanoide\Documents\maya\modules\Locomotion-2023_11_20\scripts\locomotion\recording.py", line 301, in plans_to_animation
# start_frame, end_frame, dst_to_out = extract_plans(plans)
# File "C:\Users\Humanoide\Documents\maya\modules\Locomotion-2023_11_20\scripts\locomotion\internal.py", line 507, in _undo_chunk
# return func(*args, **kwargs)
# File "C:\Users\Humanoide\Documents\maya\modules\Locomotion-2023_11_20\scripts\locomotion\recording.py", line 280, in extract_plans
# mod.set_attr(out["tx"], trajectory["tx"])
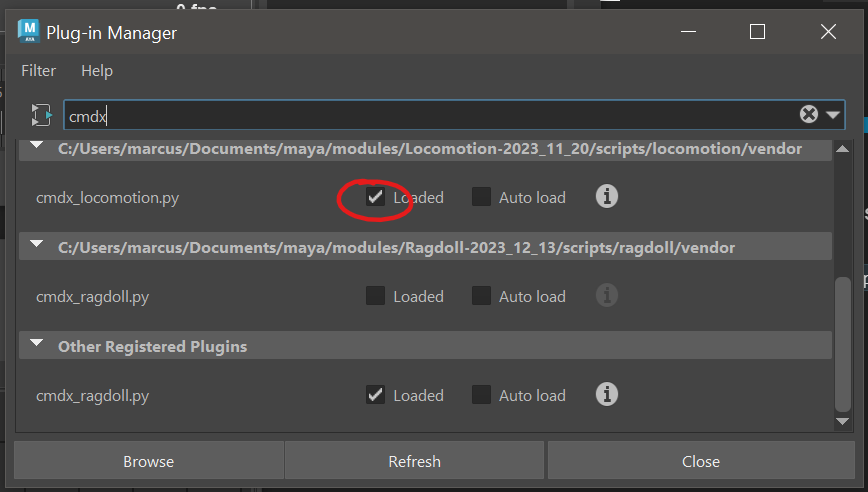
# File "C:\Users\Humanoide\Documents\maya\modules\Locomotion-2023_11_20\scripts\locomotion\vendor\cmdx_locomotion.py", line 5710, in decorator
# return func(self, *args, **kwargs)
# File "C:\Users\Humanoide\Documents\maya\modules\Locomotion-2023_11_20\scripts\locomotion\vendor\cmdx_locomotion.py", line 6269, in setAttr
# result = _python_to_mod(value, plug, self._modifier)
# File "C:\Users\Humanoide\Documents\maya\modules\Locomotion-2023_11_20\scripts\locomotion\vendor\cmdx_locomotion.py", line 5326, in _python_to_mod
# with DGModifier() as dgmod:
# File "C:\Users\Humanoide\Documents\maya\modules\Locomotion-2023_11_20\scripts\locomotion\vendor\cmdx_locomotion.py", line 5781, in __exit__
# commit(undoit, redoit)
# File "C:\Users\Humanoide\Documents\maya\modules\Locomotion-2023_11_20\scripts\locomotion\vendor\cmdx_locomotion.py", line 8331, in commit
# getattr(cmds, unique_command)()
# AttributeError: module 'maya.cmds' has no attribute 'cmdx_0_6_3_command'
Occasionally when trying to assign plan I also get this warning:
// Warning: Disabling rPlan_bodyCubeShape due to missing targets.