Hi Marcus!
Having an issue with the limits and rotations of markers again. They are being ignored or act weird in arbitrary occasions. Trying to recreate the issue, but unfortunatly cant get it on record. It occurs as far as i can tell on leg and spine markers.
Can i send you the file in dm so you could take a look? I might have messed up some settings or anything else im afraid.
Hey @LL_LL, try to break it down.
If you make a single joint-chain, about the size of the leg, do limits work? If you replace the mesh with your real leg meshes, does that change anything?
If you post each step, we can break it down together and hopefully solve future issues for future readers too.
Yes limits and replace mesh work fine. Its only on my current rig that sometimes limits being ignored on spine markers and stiffness parameter is not symetrical on legs. Left leg needs more stiffness to raise then the other leg. Also i dont know its a limit or stiffness issue, but when leg reashes limits it starts to go nuts…
Weird stuff.
Regarding limits, the solver has max limit value like you mentioned last time.
Understood, did you try the single joint-chain I suggested above? Could you post the result? It needs to have the same general proportion as your character. Ideally you would author it in the same scene, then you could hide your rig etc. to make a recording.
Also, which version of Ragdoll are you on? The limits got a makeover in the latest release, you should no longer need to crank up any values but instead rely on the new Scene Scale manipulator to simulate at a proper scale.
Missed the latest update, installed it and tried your suggestion. Here are the results and an increase of simulation time by double with complete rig
Hm, are you able to export this as a .rag file and upload it here? It can be just a capsule, if the problem still occurs with that. Your substeps and iteration numbers look suspicious. Should never be a reason to go that high.
I´d prefer to dm you the .rag if thats ok. it includes the complete rig etc.
Sure you can DM, but try not to send the whole rig. Just this leg is enough to narrow down and debug the issue.
If its just the leg i can post it here no problem
test.rag (281.5 KB)
Having a look at this now, and to confirm we are seeing the same thing, can you Load Physics on this .rag file and:
- Set Limit X = 20
- Put some keyframes on the leg
You should end up here, which is already quite close to what you are looking for I think? The limits are naturally soft, to mimic a real “limit” such as when you raise your leg as much as you think you can, and then push a little harder.
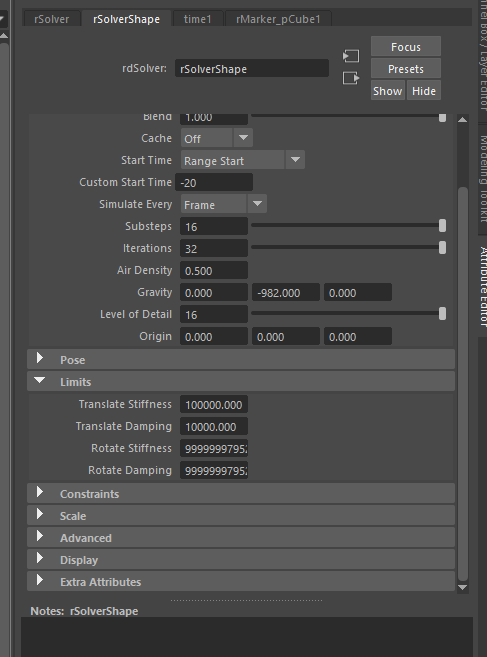
After increasing the limit stiffness on each Marker:
Here are the settings for this, notice I lowered the very high substeps and iterations back to 4/4; this has a great impact on performance and should rarely need to go above 8/8.
Note that stiffness can get even lower and still look realistic, damping keeps it from bouncing outside the limit.
Next I noticed there is a knee shape too, and that the knee is much smaller than the lower leg. This can be problematic, I would recommend you try and keep parents heavier than its children as much as possible. Here’s an example of the effect, and how to manipulate it.
Notice that as the knee gets heavier, it gets stronger. A stronger knee will push harder against the limit, so the limit needs to be stronger as well.
Thx for the detailed instruction, will change my setup according to it as soon as i can and see if it solves the problems im facing. And yes my actual rig has heavier parents than its children, generated the leg without any changes.
But is there something like a sheet with realistic parameters for the body parts of markers?
Hi @LL_LL, just checking in to see how things are going, did you manage to overcome the issues with limits?
I also spotted just now a question at the end of your last comment; sorry about that!
Other than getting their volumes right, which determines their mass, there is nothing unique about body parts from any other object. The challenge with your double-knee is that it doesn’t exist in an actual anatomy, so you are bound to get unrealistic results that way. Deformations likely look better, so I understand the trade-off. If I was you, I would simulate just the upper and lower leg, and leave the double-knee for deformation-only.