Hello,Dear Marcus,I found that I accidentally called this rMarkers group.Because sometimes selected mark will fail, this is more convenient, but I forget how this appeared.![]() Where should I call it up?
Where should I call it up?
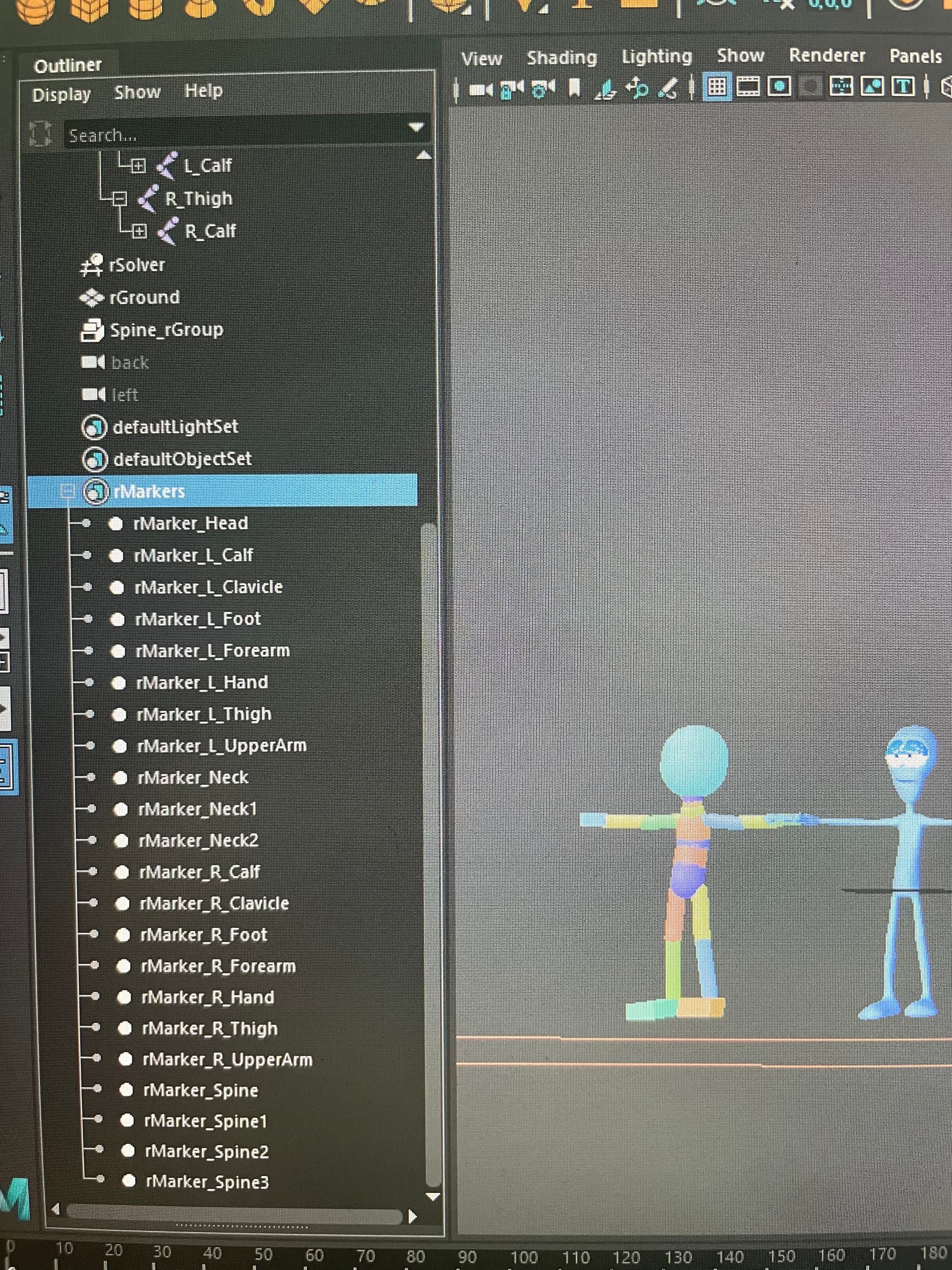
In the option dialog for “Assign and Connect” there is an option to add each new Marker to a set.
1 Like
Okay, thank you very much🥰
1 Like
Hello Marcus, sorry to bother you again,I saw the stairway of Full ragdoll ll video and I want make a floor by a cube.But it doesn’t work after it is kinematic.Why did character go through the cube?

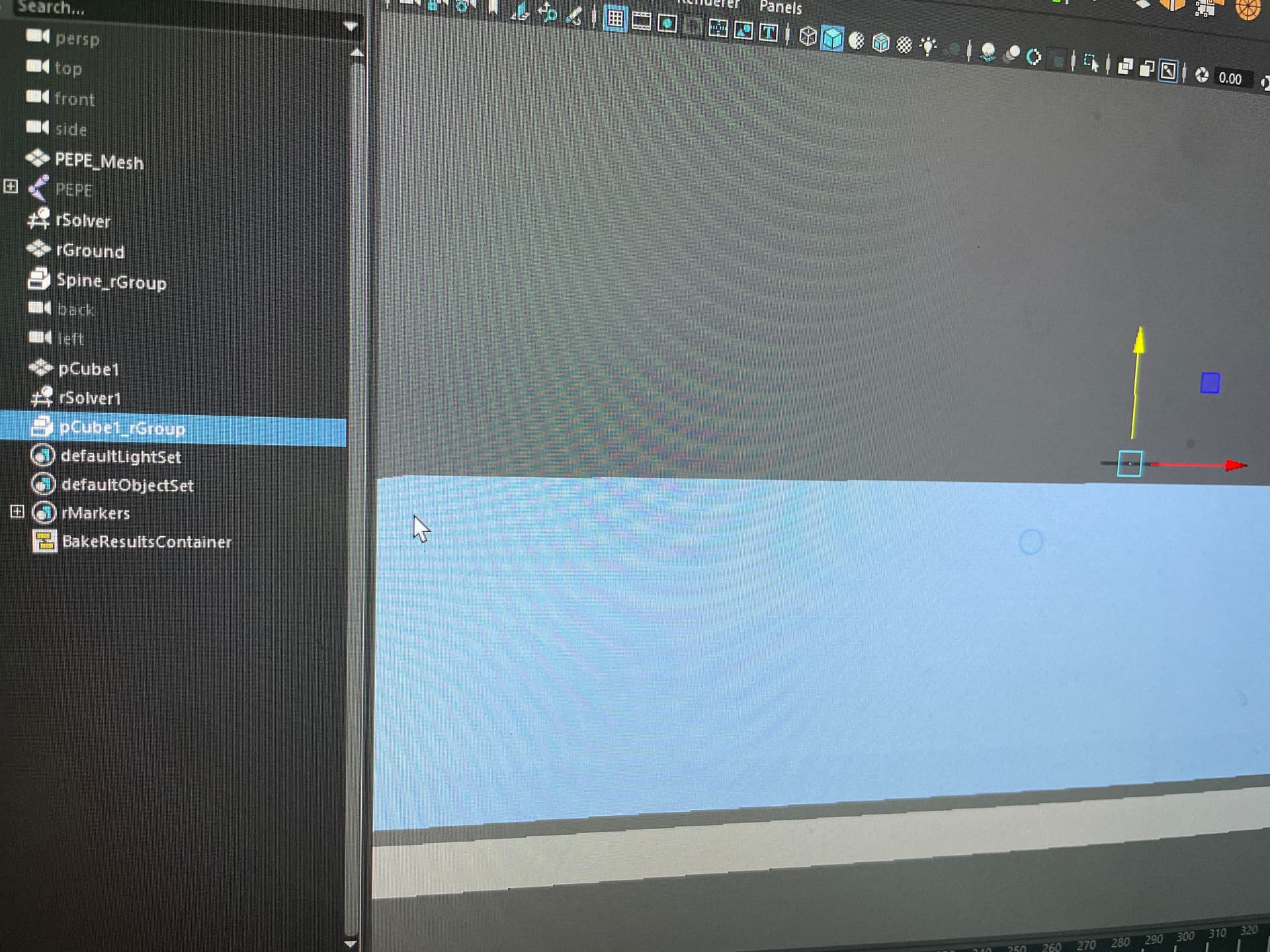
It looks like the floor might be part of a separate solver. Only Markers in the same solver is able to interact with each other.
You can either:
- Select both solvers
- Run Ragdoll → Edit → Merge Solvers
Or you can remove the marker from the ground, and assign again. This time, in the Option UI you can pick which solver to assign the Marker to. Usually, they would all end up in the same solver, so check your default options. There is a menu item to reset the options within the Option UI.
Yes, it is not in a solver.It works. I found when character hitting
the ground, the head and feet occasionally get stuck under the floor during the shaking process. What is wrong?
At the same time, more seriously, I found that rotation limit invide that mentioned to you before still have problem.
I adjusted the single stiffness of arms and legs,it really works.but It limits the rotation angle only when it moves slow, after it moves fast, it still exceeds the limited rotation angle,And the spine will also be severely twisted. But I can’t increase the stiffness any more, because I have to ensure that it is soft or vertical when body is relaxed.
This seems to be a problem that it is difficult to balance stiffness with rotation and speed.
Hereby, I attach a project.Maybe it’s clearer than the picture. ps:I hide the floor cube and its solver, because there are 2 question involved.
Because few people use ragdoll in my country, the forum is my only hope, if it can’t be solved please tell me. Thank u again.
tpyrced_floor&limit R.mb.zip (3.9 MB)
Your sincerely.
The ground is normally quite thin, so if the character is moving too fast then it’s possible it’s passing through the ground before collision detection kicks in. Try scaling the ground up to make it thicker.
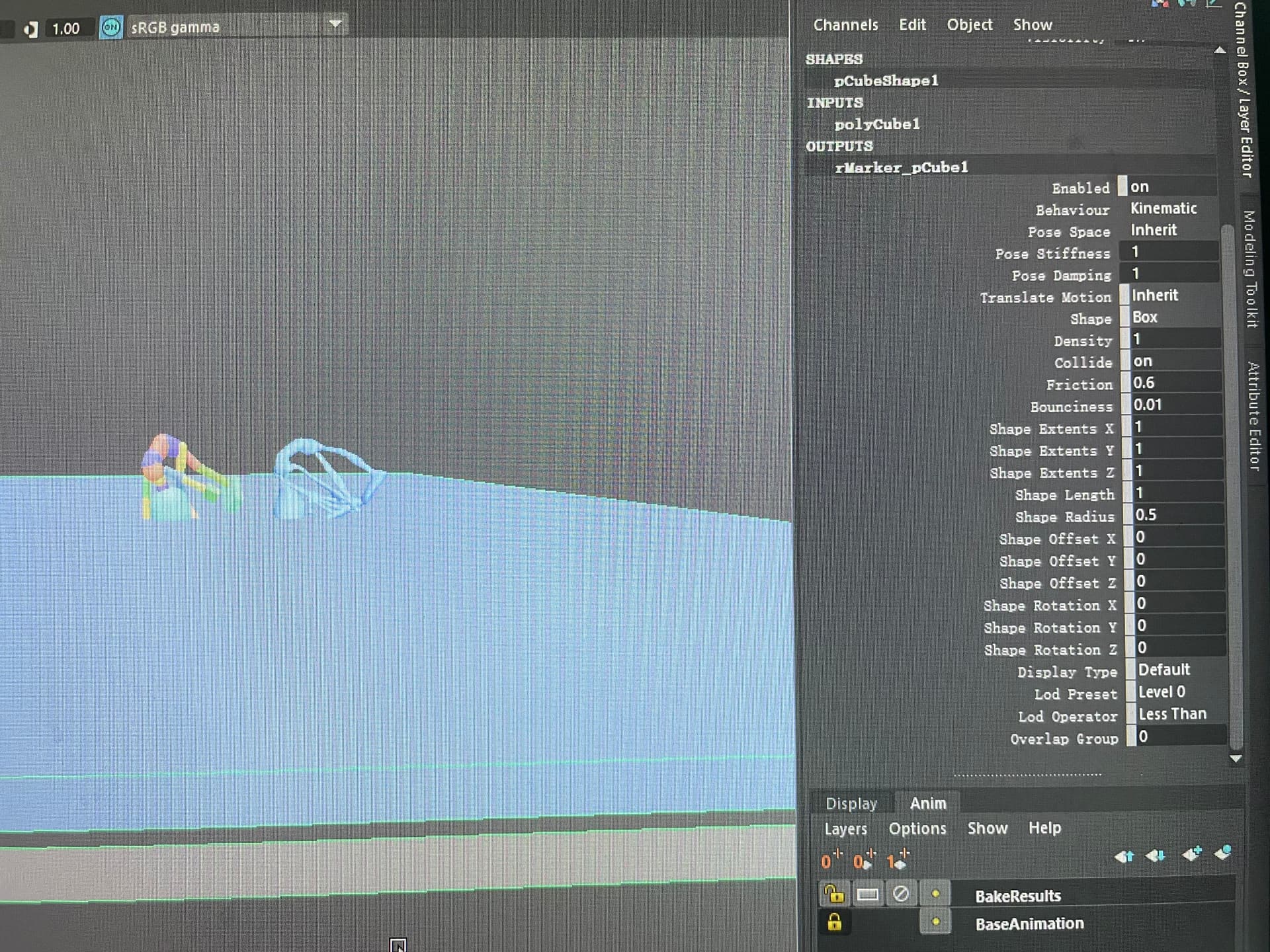
Try reducing the Density on the feet. Based on your screenshots above, they look large which makes them heavy. All limits are soft, and when they are under too much pressure they will fail to keep Markers within the limit. But if the feet (and possibly lower legs too) are lighter then the limits will be able to counter-animate them more easily.
Which country are you in? I would be love to chat with you about how to make Ragdoll more common where you are, for example if a translation of the attributes and menu items would help!
If the above suggestions still won’t work, I can take a look at this. However we unfortunately cannot open .mb files here, would it be possible to send this as a zipped .ma instead?
First of all, thank you for your reply. The floor problem has been solved.
I have tried to reduce the mass of feet and leg and head before.
I remember that they will not be able to hang down at normal speed, and their movements will behave like feathers, not like normal body mass, right?
I’m a 27 mocap worker from China, and I’m studying this in order to combine it with the mocap data and get a difficult effect that can replace actors’s performance and ptimize our capture plan.I think this is a very potential thing.
We can all understand English software. Don’t worry about it. ![]()
It’s just that almost no people in China uses it, and only here have the tutorial, so it’s hard to learn for me. I’ll try it again this weekend according to your suggestion. If it still doesn’t work, I’ll provide ma zip file.Thank u my teacher~🥹
They would act lighter, yes.
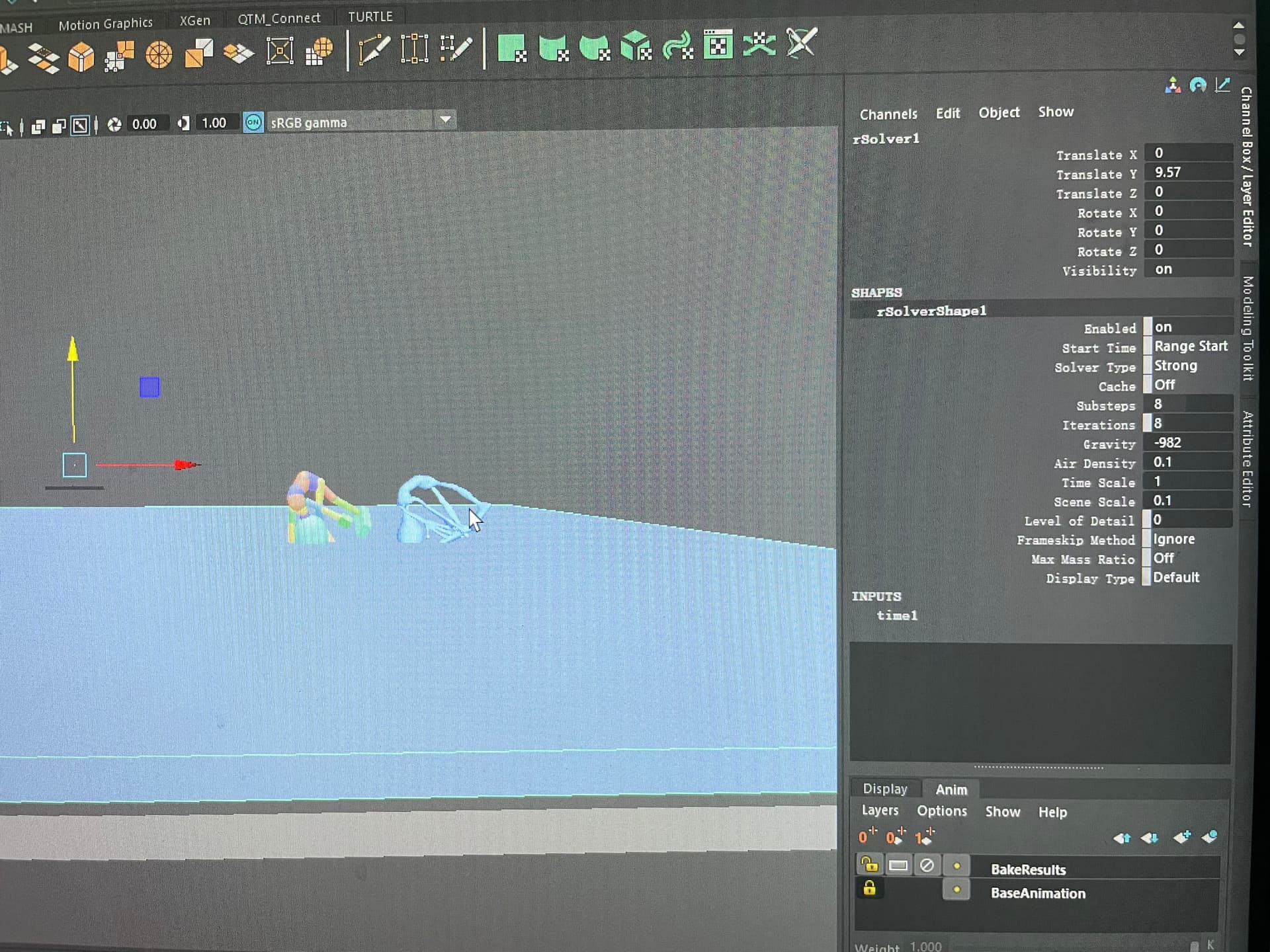
If you cannot make them lighter, then the only other option is to sacrifice performance for stronger limits. You can increase the Substeps and Iteration attributes on the Solver node, and keep cranking up the Limit Stiffness attribute on either the solver or on the Markers where limits are being violated.
Oh that’s great!
Do you think the challenge for Ragdoll in China is to make a different set of tutorials? Have you seen these?
Is there any particular tutorial you find challenging, or anything you are wanting to see that isn’t currently there?
This forum is also packed with extra material.
Hi, Marcus, I’m sorry to reply to you now.
I used a temporary computer on a business trip in other places to send files to you, so I haven’t recorded this one without buying a commercial version in this computer.
I tried to strengthen the iteration, and I feel that the action will become a little stiff again. Now the iteration is 3, and I hide the floor.
May you record it to see what I said now.Limit rotation is invalid at quick speed.
I have been studying the tutorial you sent, and I also know that you are a very powerful anime producer, so I am sorry to bother you with some strange problems while studying slowly.
I also wonder why there is no Chinese tutorial in China, but we have blender and unity ragdoll Chinese tutorial.Is very funny,I will try my best to learn your ragdoll.
Here is the ma file.Can u take a look?thank u again.![]()
limit R.zip (4.3 MB)
Thanks @Fangmiao_Li, but the file you sent has the “vaccine” virus inside of it. I would recommend getting rid of it, to avoid infecting more computers.
Here’s one way of approaching it.
Ok, I think it should be ok now.It took some time.
limit R.zip (4.3 MB)
Ok, here’s what I’m seeing.
And aside from a few red flags, primarily the very heavy head and very fast motion, there is one thing I don’t understand. No matter how high I set Pose Stiffness, nothing seems to change.
Would it be possible to show me how you created this?
When I try to recreate it, I see this. Can you confirm this is what you see as well, if you follow along?
And if you can record yourself setting this character up, that would help a lot.
Thank you Marcus, I didn’t do the previous test like yours.I’m going to do it again, but I can only record 100 frames now on my computer.Is it necessary to buy a commercial license to record all of them?
Can I make this previous test at -300—0 frames?
What I’m looking for is a recording of your screen, like the one I made above. So I can try and spot where the problem is, as you work on setting up the scene. If you can keep it below 20 seconds that would be great and keep the filesize small.
To record the simulation past 100 frames, yes you’ll need a licence for that. But we don’t need to record the simulation to solve this issue just yet.
Hi, Marcus, I’m sorry it took me so long to reply to you. ![]() I’m a little busy these days,I did it again according to the video you sent, but I didn’t get the same effect first. I decrease all mass of the markers to have the same effect as yours.
I’m a little busy these days,I did it again according to the video you sent, but I didn’t get the same effect first. I decrease all mass of the markers to have the same effect as yours.
At the same time, I keep the rotation stiffness limbs at 0.005 and the limiting stiffness at 1,000,000.Substeps and Interations is 8.Finally, this effect is achieved.
During the process, the limbs will not be over-rotated, but the drooping degree will not be perfect when it slowly.I think I’ve tried my best and I’m satisfied. Maybe this is the best effect, except that my legs are not vertical at the end.Maybe these values can’t perfect attainment my requirements, because they will be a bit contradictory. ![]()
Thank you very much,I think I’ve learned a lot. I’m doing the constrain effect now, and there will be new question. Please don’t mind a little fool.I think I’m really a little stupid.If there is an opportunity, ![]() welcome you to China. I will take you to dinner too.
welcome you to China. I will take you to dinner too.
Sincere blessing
1 Like