Hi, actually I have a few questions, I really tried to study the materials, but most likely I really won’t understand until I go through my own examples, sorry for that.
I have a model of a knight in which I want to recreate the physics of some parts.
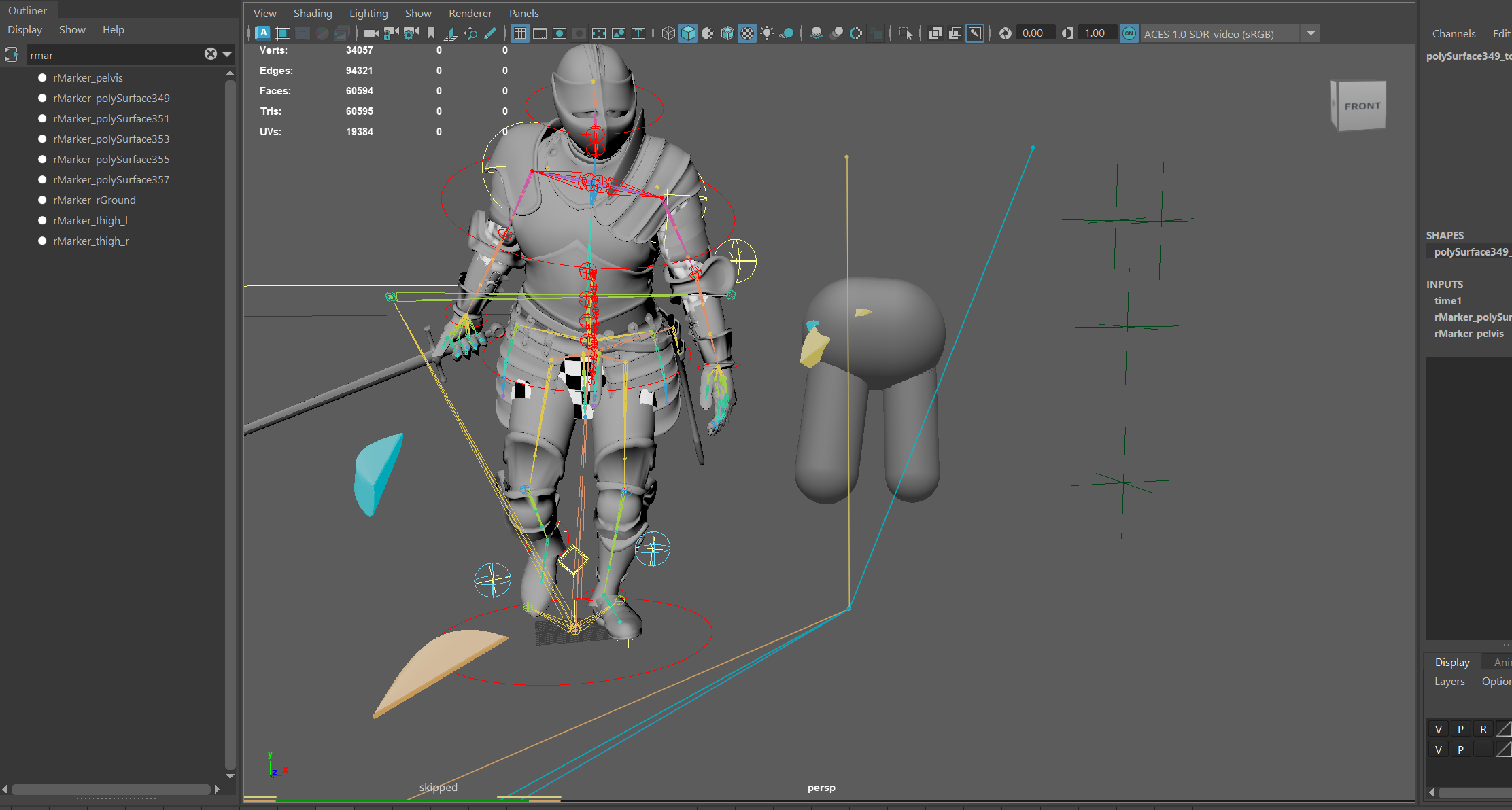
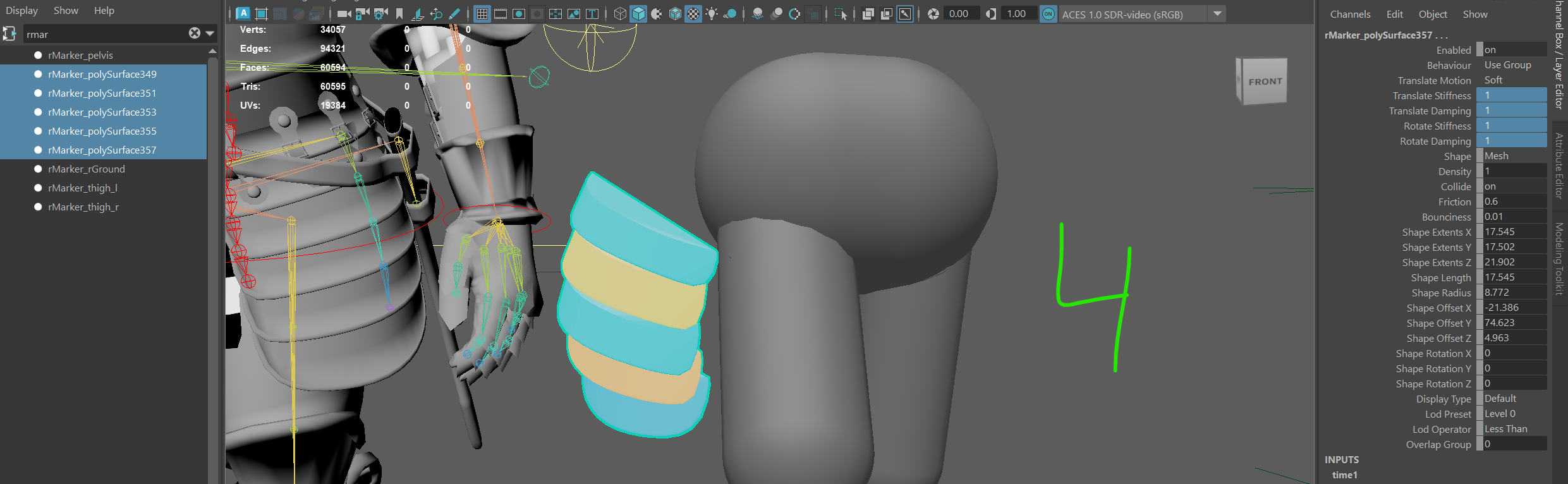
Protection on the hips, it is assembled from several elements. Screenshot 1
I need the protection to collide with the legs, the chain mail(checkerboard material) and a belt strap.
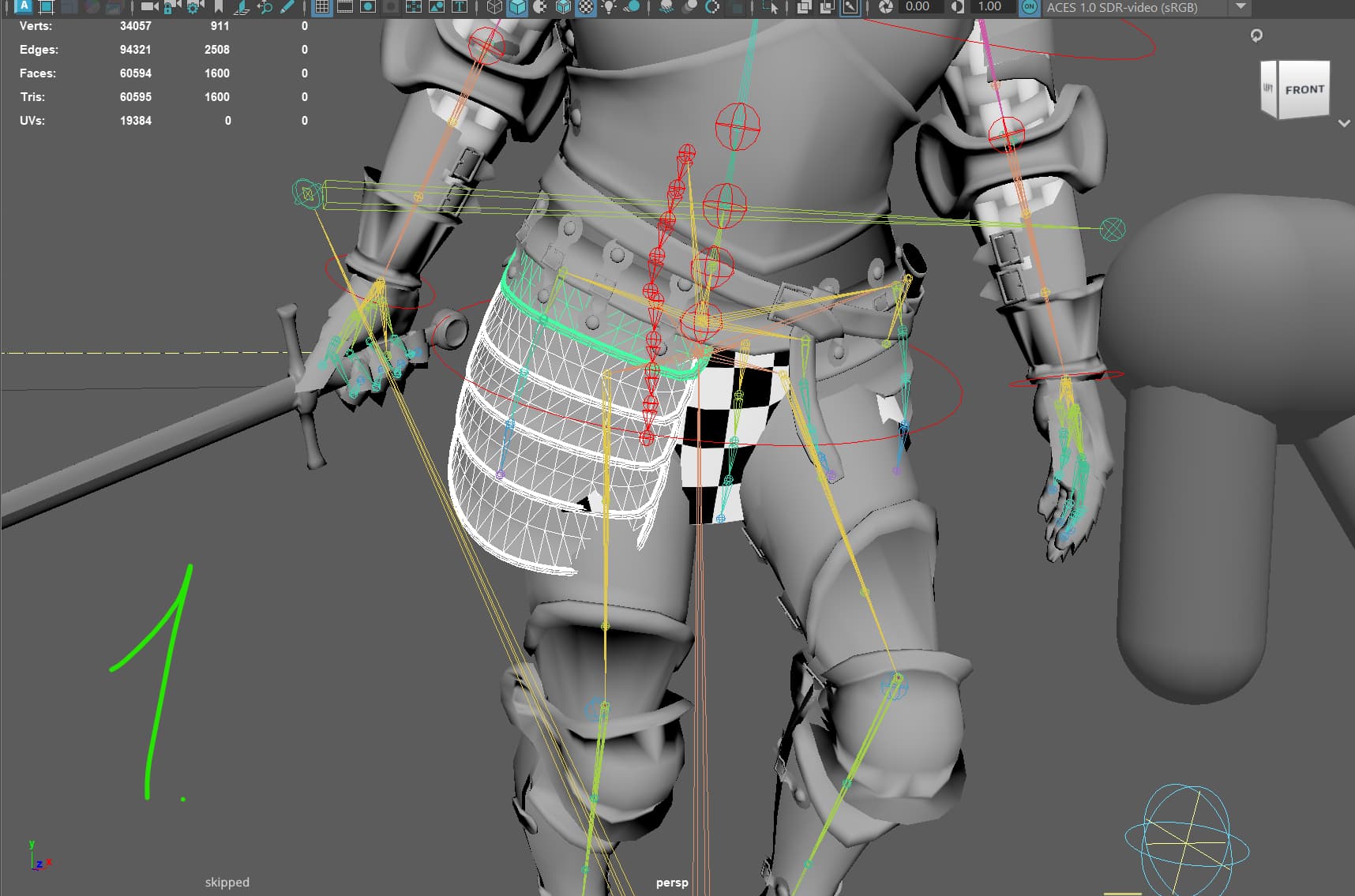
I know that there are 2 settings, these are Animated and Simulation, and I realized that if the legs are not simulated, then I choose Animated, I created capsules from joint, and the protection itself has an unusual shape, so I created it through geometry. Screenshot 2
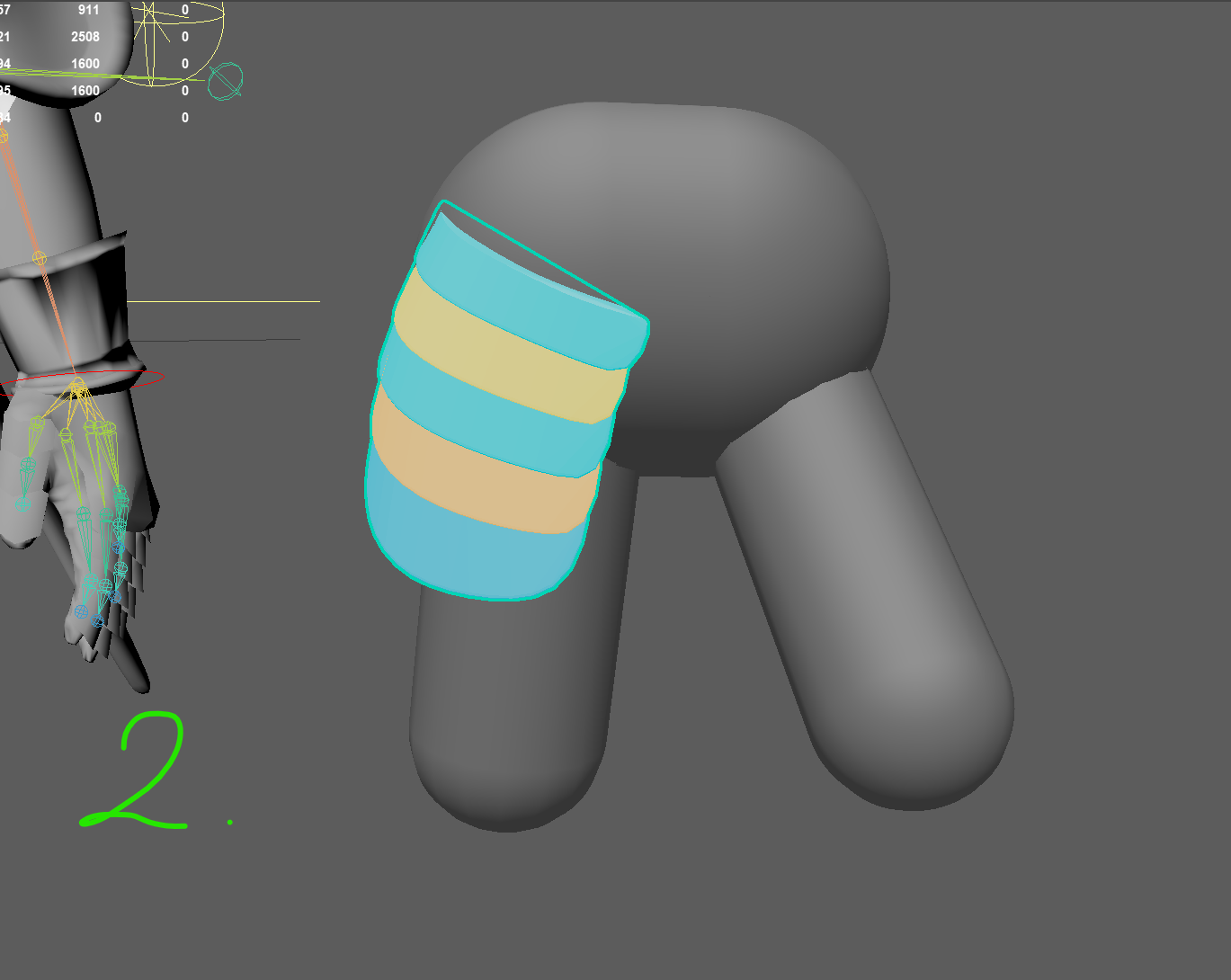
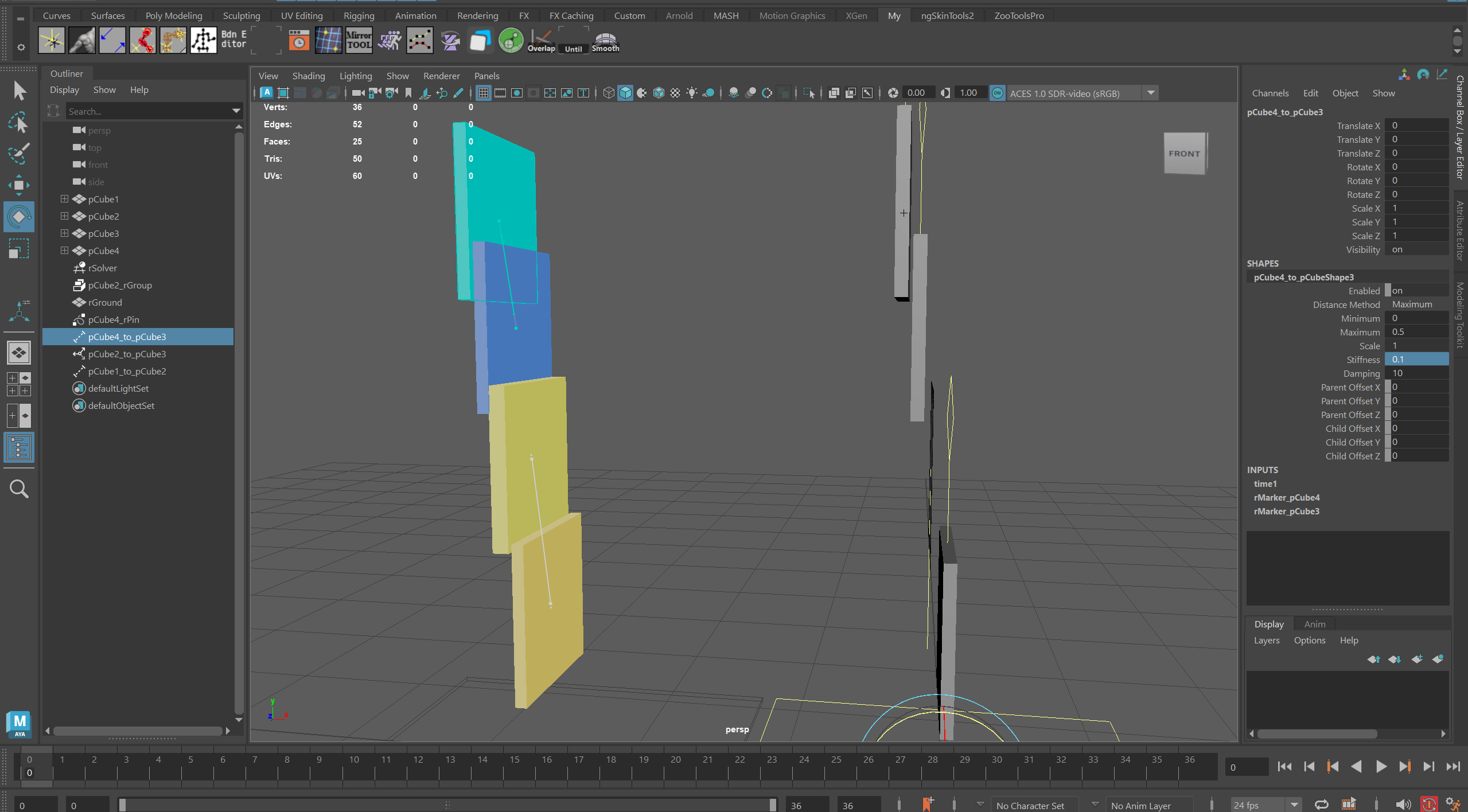
- The question about the settings is whether I understand correctly that they now look like this. Screenshot 3. Where do I have to select Translate Motion in Soft mode to adjust the mesh to follow the original animation and turn the Dampind and Stiffness settings there?
- Is there any quick way to manage the selected Markers (when I need to select several at once)? In the video, you somehow quickly selected and configured them, through Manipulation he selects one at a time, I could only use DAG object off. And then I found rMarker and selected several at once.
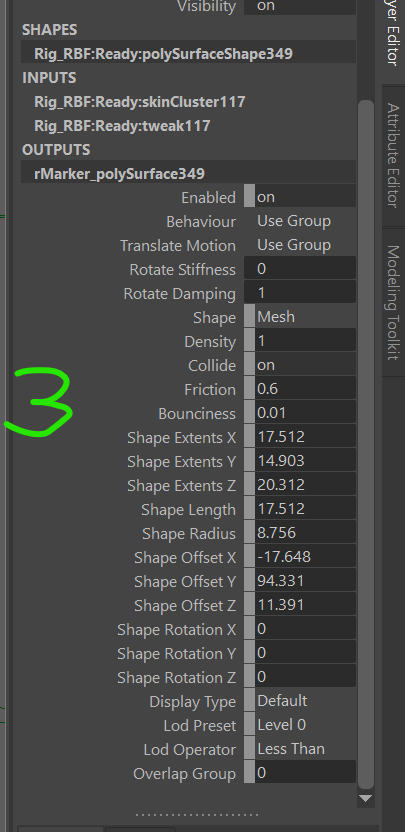
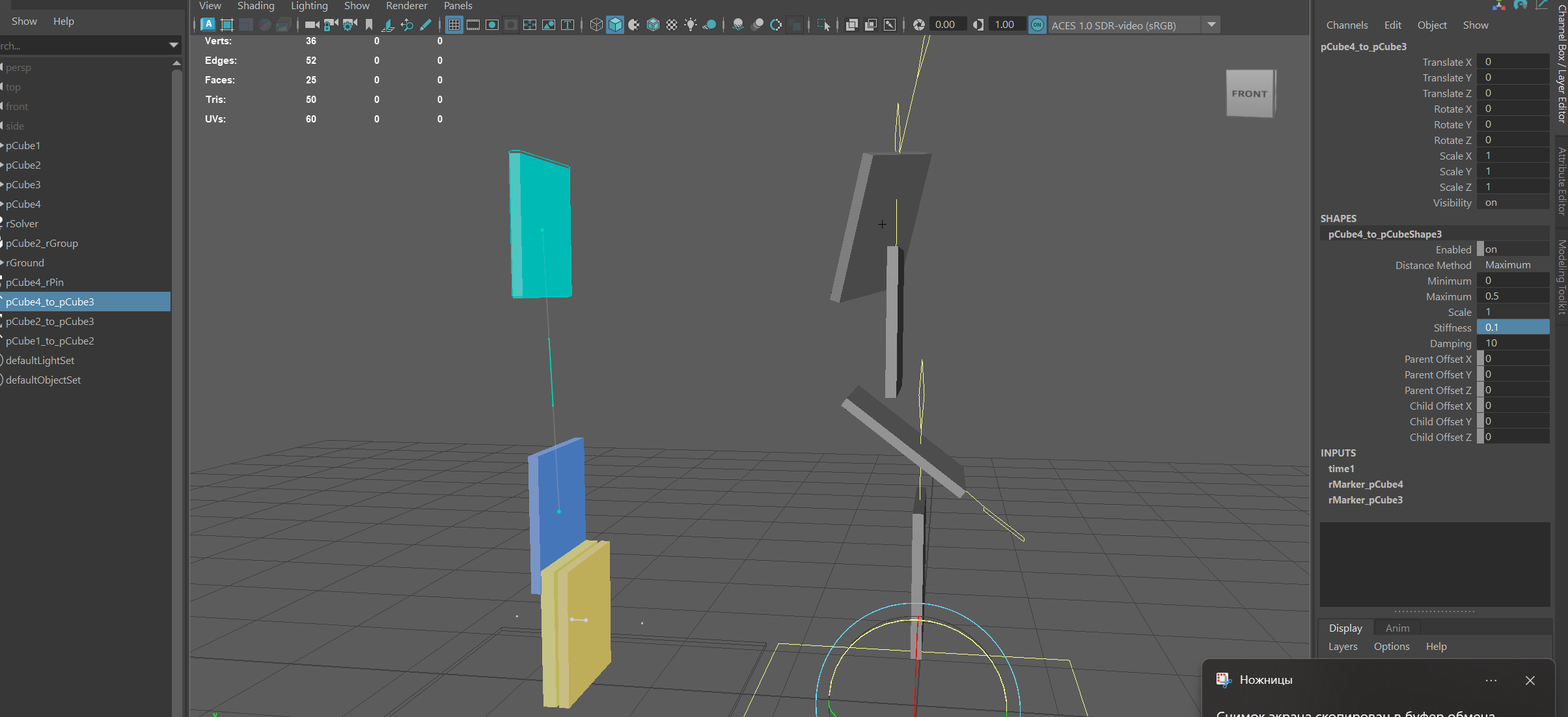
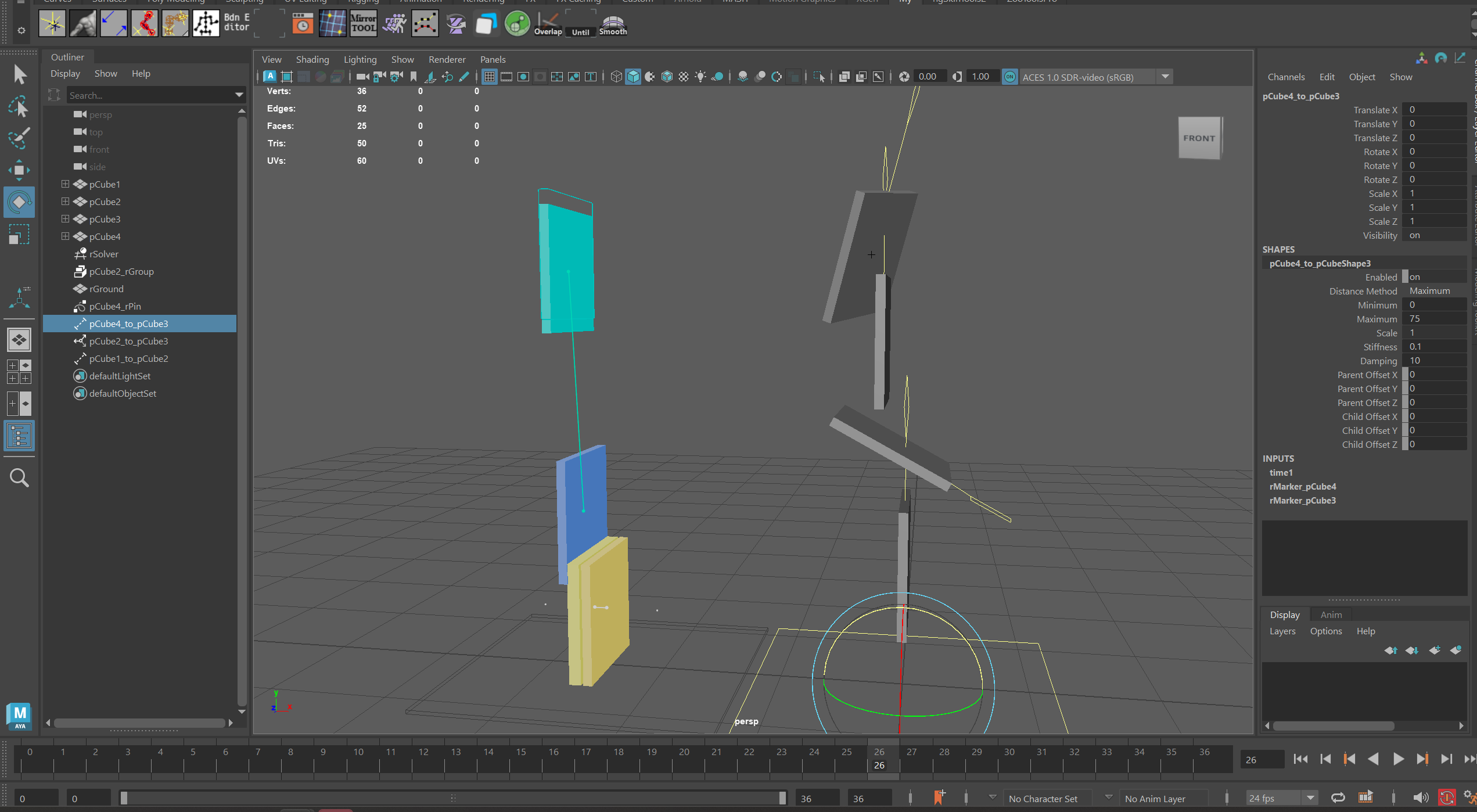
- When I select the elements I need, it’s worth turning on the animation that happens. Screenshot 4. These parts fly away on their own, even with these settings, I tried to fix them via Weld, but nothing helped me, how can I solve this problem?
- Also, if I apply Weld and attach the main protection to Pelvis, then this happens. *
*. And then I don’t understand how to solve this problem, I tried to select all the security features and disable Collision, but it didn’t help me.
Maybe I’m doing something wrong with the settings, but I stopped there, and then I want my protection to not go through my legs, chain mail, and even a strap, as I wrote above. And I also want all this to be simulated and then I would have already made a Bake and edited it as I need, so the first part is here…
It might be better if I just send a model with animation and it will be faster to show it (I can translate the video through the browser, so recording a video with voice is an option).
I really hope you can tell me.