Hi
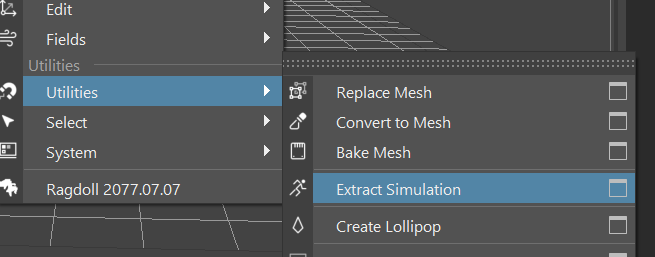
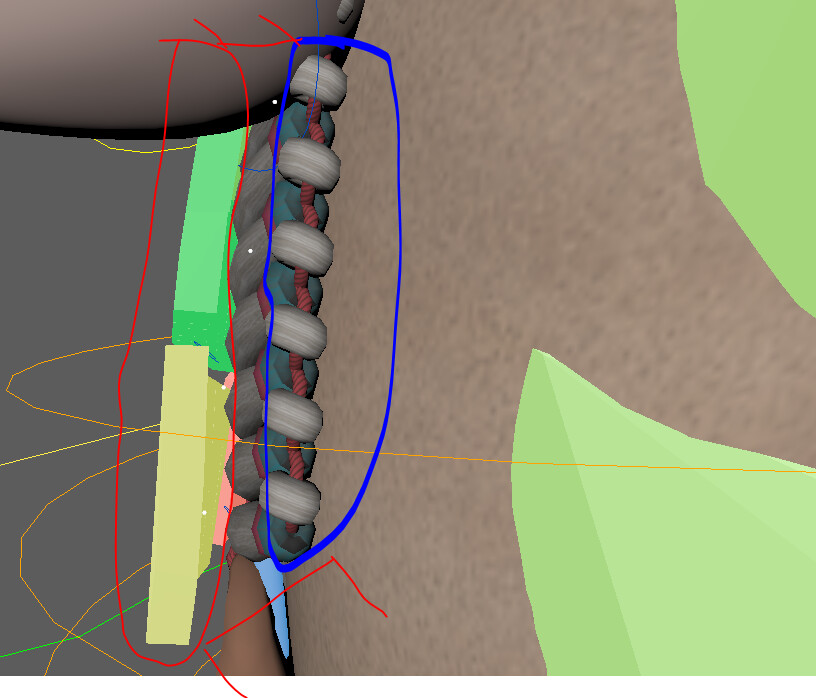
Not sure why but when simulating the geometry doesn’t follow exactly what the manipulators do, like an offset or something like that. Does it exist a way to fix it? In this case I need the geo follows the manipulators as much as possible.
The right manipulators are kinematic in collision with the left ones (dynamic/local) with different overlapping groups
Thanks