Hello,
Yes, the fields definitely changed for me too a couple versions back. Had to dramatically lower the values on all the rigs. I think it behaves more as expected now with fields magnitude at 0 though. Before it was not completely off at 0, for my setup at least.
As for this and other drone setups - I didn’t quite use the example Marcus provided here with the Volume Axis Field. Instead it was Newton Field applied to the propeller(s) marker as Used as Source with the negative value, so it pushes the markers out. And , generally, two pin constraints - one for the rotation and one for the translation, so that the drone does not flip. I suspect you could use the VolumeAxis Field if you want a more global effect instead of a local one with Newton.
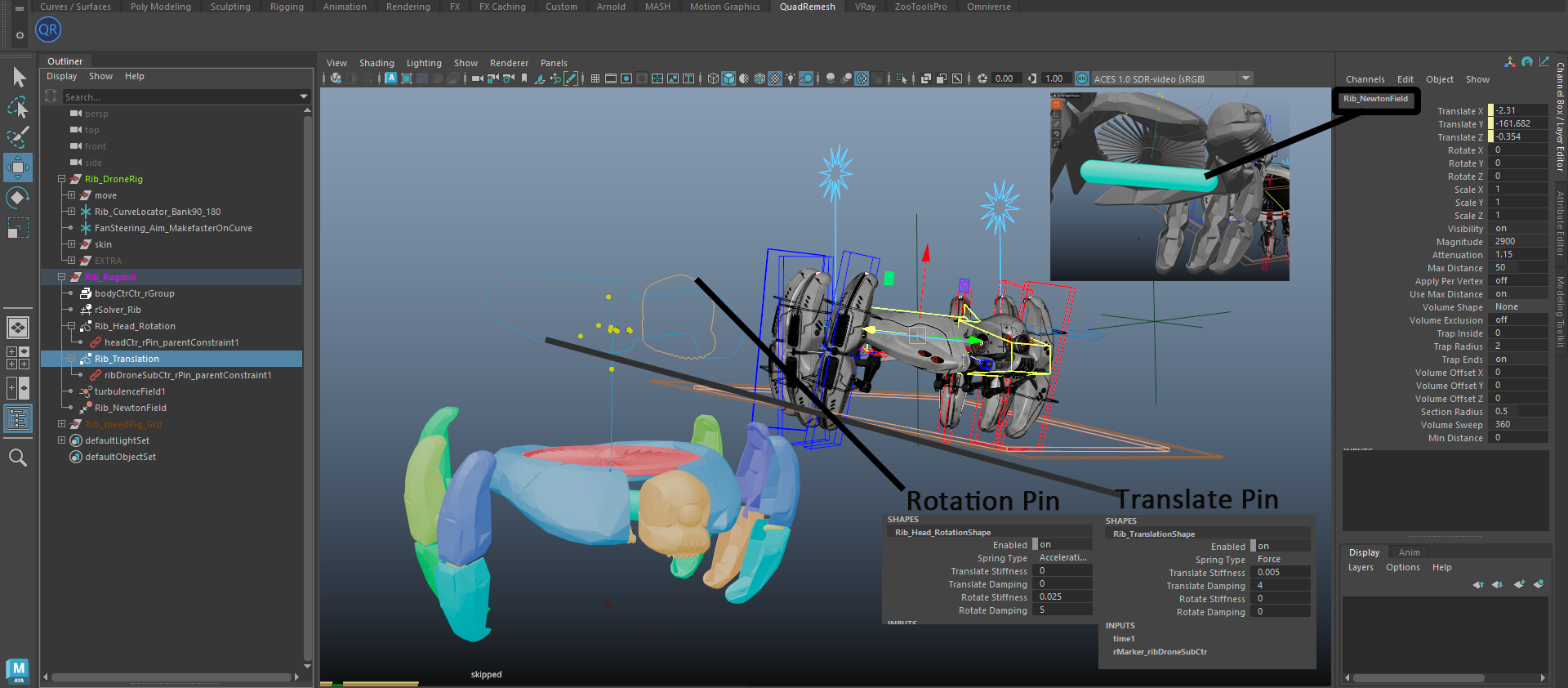
In this case the Newton field is attached to a shape below the drone, which copies the prop rotations cause I wanted to add some more shake to the drone, but on the other drones I attached directly to the propeller. Similar to the shake we applied here: How to blend Kinematic without affecting the position of the sim?
For my case, I then attach the drones to the Maya motion path (although I use ZooTools motion path rig) for animation in the shot. Similiar to Marcus fish example scene found here:
Aquarium tussle
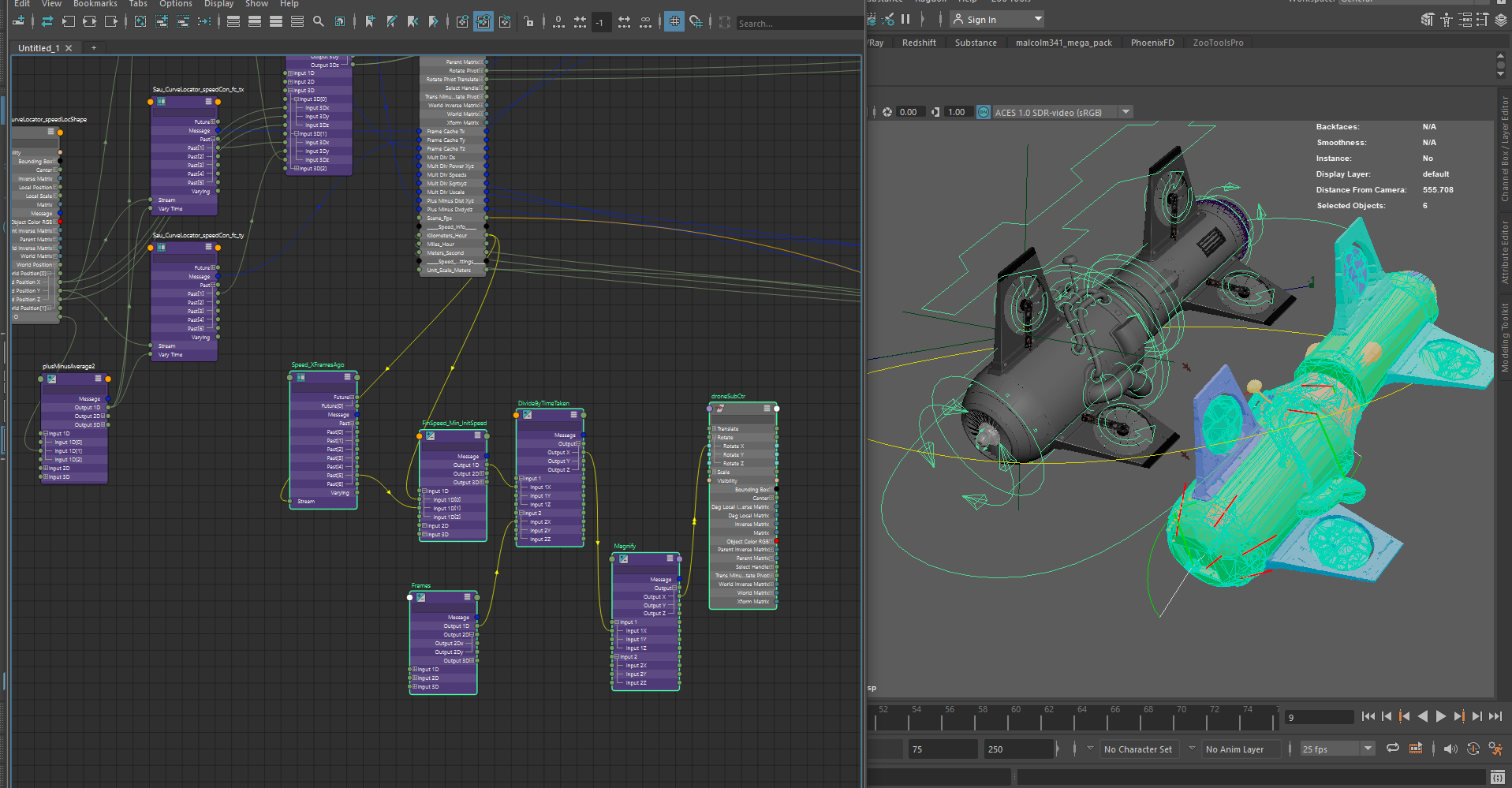
There is also a seperate Speedometer Rig attached to the drones, which I modified to tilt the drones forward/ backwards depending on the percentage of speed change to simulate accelerating/ braking. It works nicely with ragdoll as it tilts the fields too.
After that I add turbulence and uniform fields to add some “wind”.
We also discussed additional setup issues on other drones here:
Edit Marker Pivot