Hello there!
This thread is a continuation from the discord channel.
I´d like to request this feature.
As the title says, the idea is to have a smoother looking sim without putting much effort and detail into the base animation.
As you can see in the example records, the animation of the upper arm is pretty mechanical, while the sim itself eases in and out close to the sharp corners but still following the animation closely.
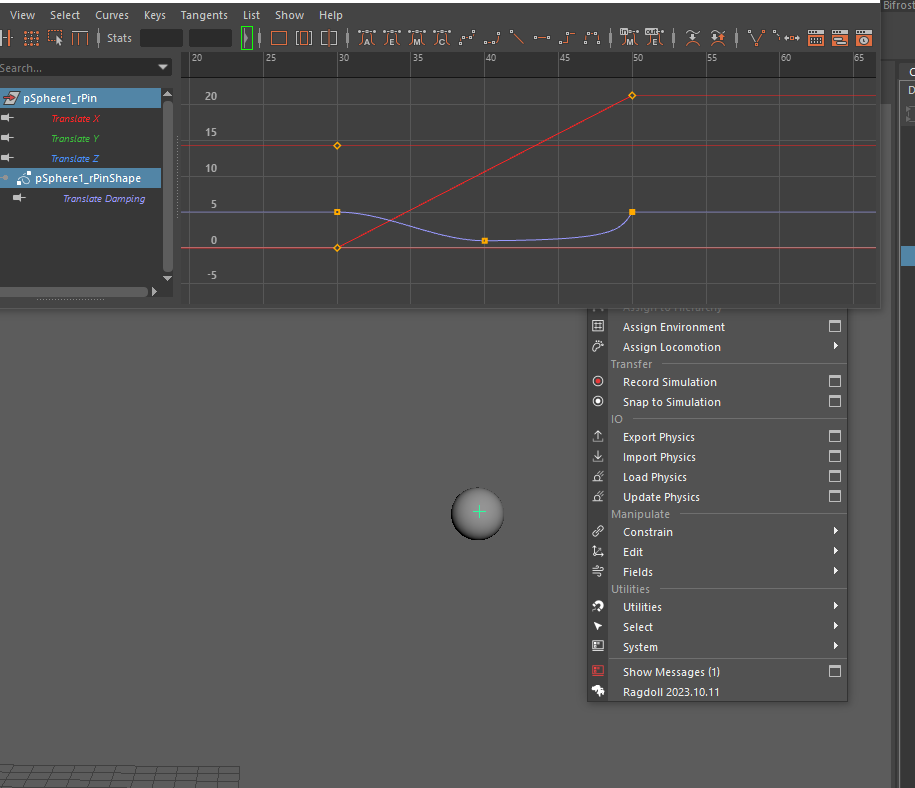
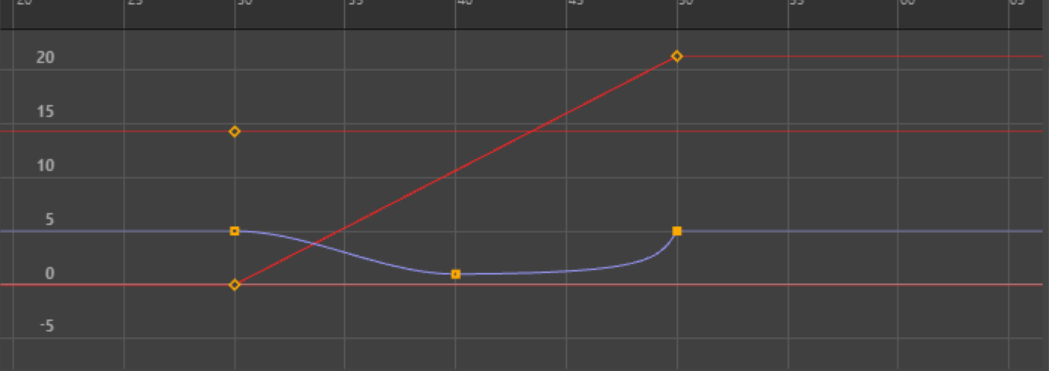
This result is achieved through keyframing damping parameter, which is tedious when done for every marker and a whole animation and could be replaced with a spherical damping field for pin constrained and a radial one for the markers with 100% damping falloff in the center and 0% at the edges.
Falloff for marker damping:
And pin constraint:
Hope i could explain the idea properly!
Best regards
Thanks for this. So I understand, the first video is what you want to have happen, and the second video is what happens currently? And you achieve what you want by animating Rotate Damping of the Pin Constraint? Or on the Marker of the upper arm?
Any chance you can upload this animation file here?
No no, both videos are what i want to have happen. I made them both to demonstrate the results, because one is done with marker damping and the other with pin damping.
Animated the rotate damping on marker and translate damping off the pin. Pin is parented to hand joint.
I´d like to upload it in private, if thats fine with you.
If you can’t upload the file, or use a default asset such as the Manikin, then the ball example from your Discord comment is better as I can reproduce.
Can you help me understand what this is? This is something you’ve hand-animated, there is no physics here? And you would like a pin constraint to move like that handle, and the sphere to follow it in simulation?
Here I’ve tried to reproduce what you have using a Pin Constraint, is there anything about this that isn’t behaving as you would expect?
Whole idea is to have smoother results with little effort by animating damping in this example.
And instead of animating damping everytime, it could be replaced by a damping sphere with a falloff, that is what i´d like to request.
My result and your result are identical. You asked for this result without animating damping, I’ve given you this result. Somewhere in our communication there is something missing, and I can’t spot it.
Ah ok, i see.
You animated the pin, which is contrary to what the idea is. I animated damping to show what that spherical damping field feature would look like.
That feature wouldn´t need any kind of keyframing of pin to give above results. The spherical damping field with its falloff would follow the pin and damp harsh motion like in the example with the arm.
Would be a very neat feature to have! Results look very smooth, even with raw animation of controls.
How high is the stiffness in your examples? Markers do follow the animation tightly. Impressive!
Thank you
Yes you can increase stiffness very high, the smooth results would stay the same, because the damping sphere will mostly effect the marker when at start and end of animated pose.
This is already implemented. The behaviour described is the default for how stiffness and damping works, for both Markers and Pin Constraints. The closer something is to a target, the less of an effect is has.
The animation of damping you’ve made in that screenshot is effectively what already happens internally.
If you still think it is different, then please demonstrate with a before-and-after the feature you are requesting. Maybe as two spheres in the same video, following the same Pin Constraint; one with the feature, and one without.
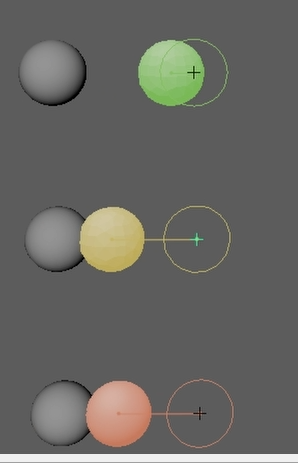
Made 2 examples now with different stiffness and damping for the default behaviour spheres.
Lowest red sphere in both videos is the requested behaviour. It follows pin animation close like the stiff green sphere, but eases in and out of harsh curves like the loose yellow sphere.
Pay close attention to how its combining stiff and loose marker distance to pin
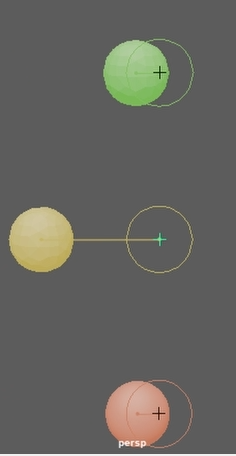
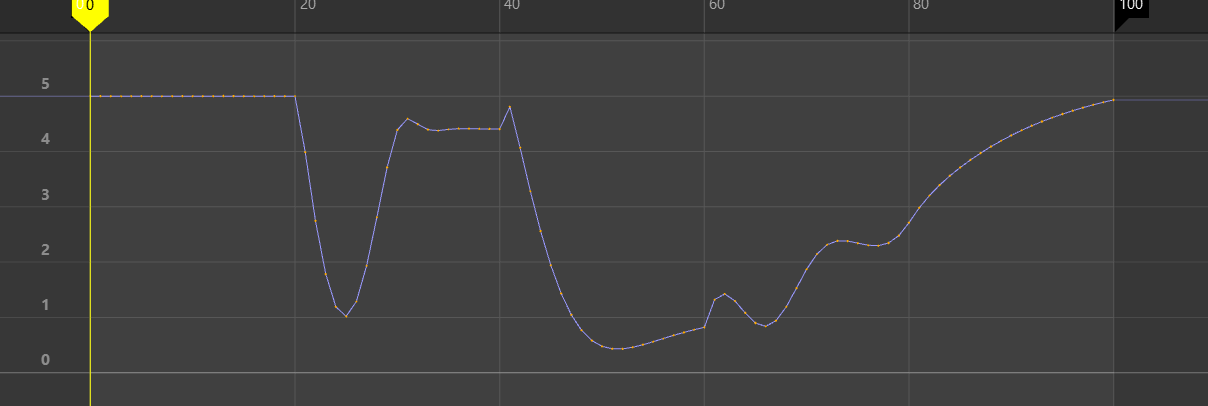
Great, this is the trajectory for each of the spheres.
Your request is for Ragdoll to produce the same erratic behaviour of the one at the bottom, as opposed to the smooth motion of the two above? And you expect this to be automatically achieved by mapping distance between target and object to Translate Damping?
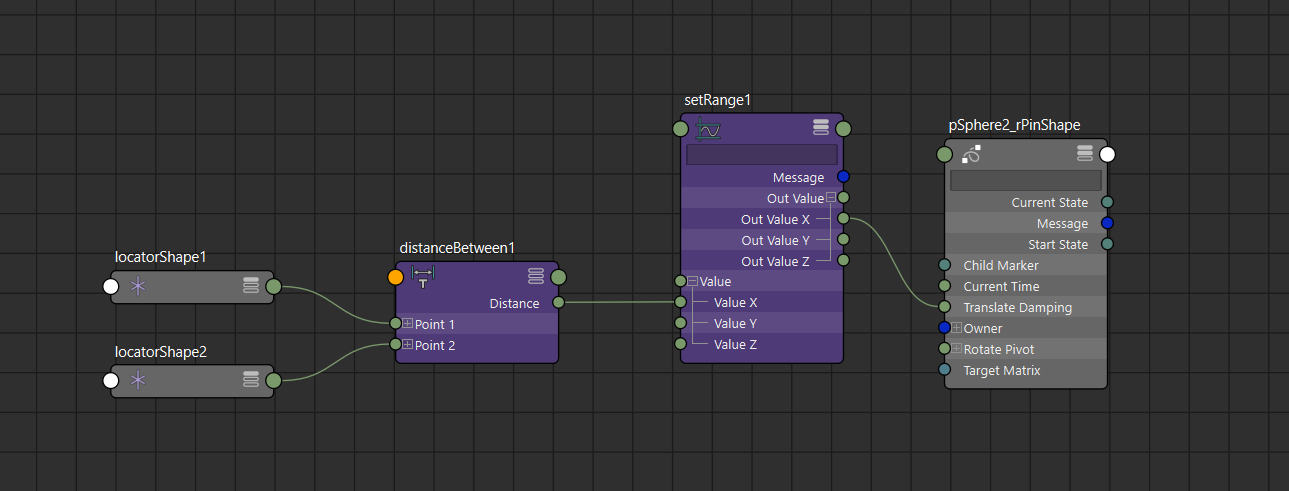
Here’s what that would look like.
In this prototype, the distance is mapped to values between 0.3 and 5.0, the same as the bottom example.
Imo the red ball looks more natural, as opposed to the other 2 linear moving balls.
Especially when ragdolling humans and other lifeforms, you want “erratic” motion and not the default kinda mechanic behaviour of current state.
Another thing that pops up is the positiv and negativ acceleration at start and end of every position, its more noticable and good for character animation.
The red one looks different because the damping is hand-animated, Ragdoll can’t do that. The proposal is for damping to be relative the distance between object and target, which the author expects should look like this: