Branching off from https://forums.ragdolldynamics.com/t/record-simulation-problem/1352/19 for discoverability.
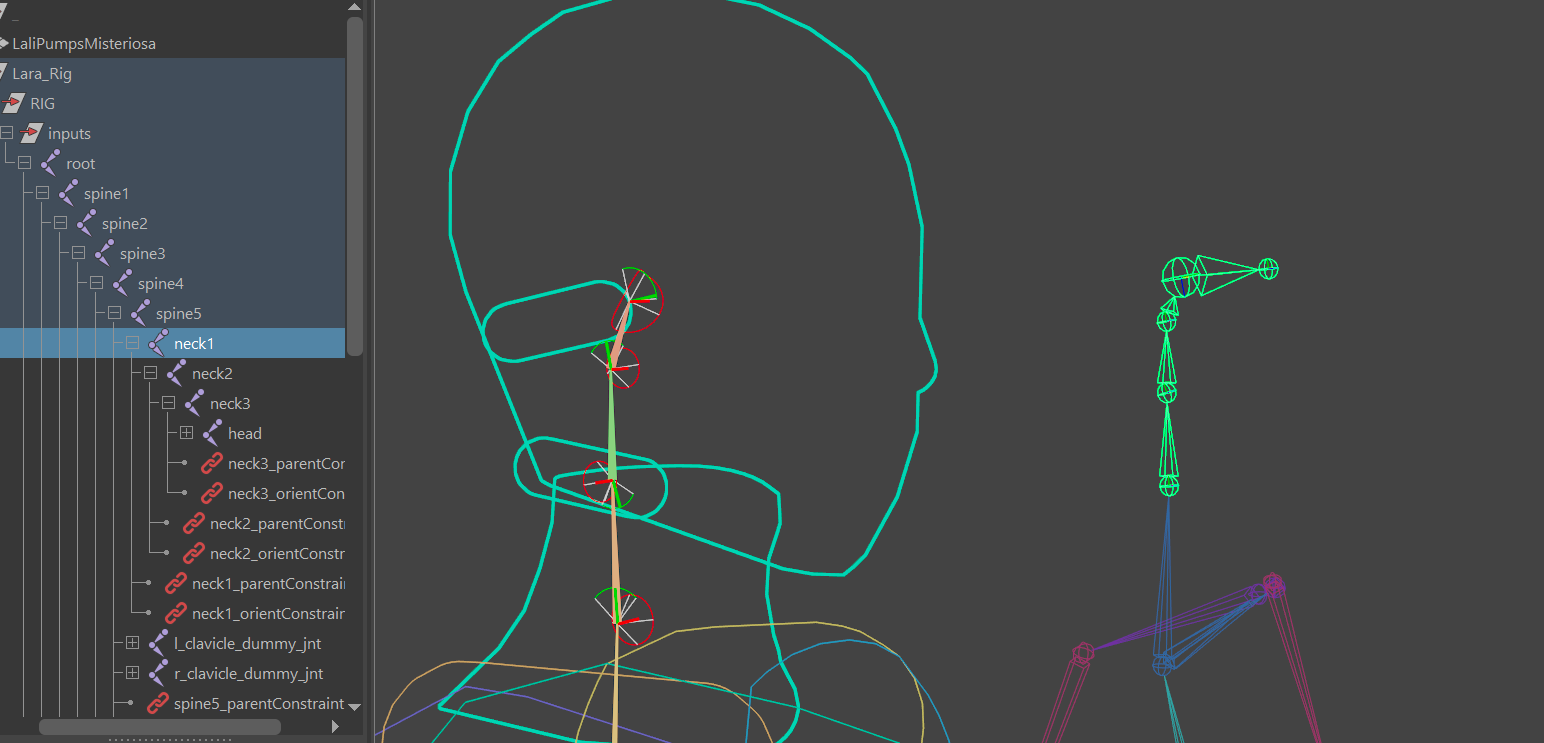
Here’s a suspect joint hierarchy with Markers.
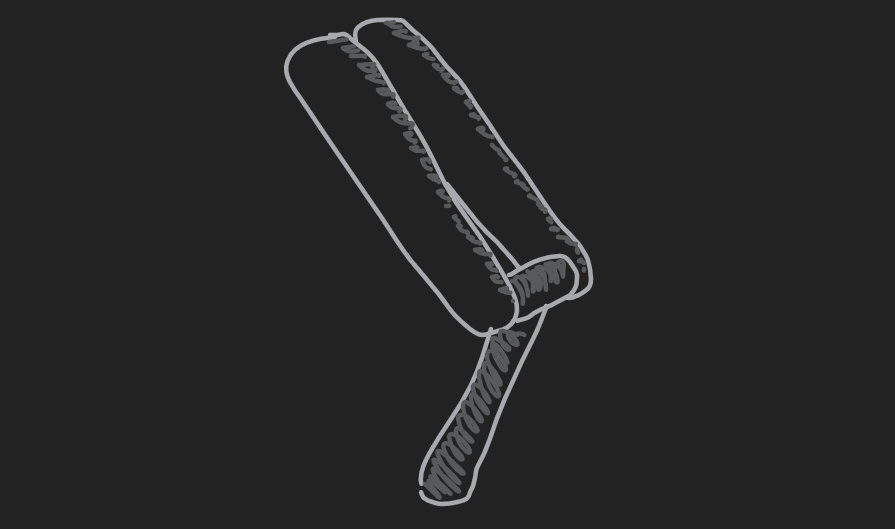
When working with Ragdoll, it can help to think of your character as a physical robot.

Here, each limb connects to each other via a physical joint. The physical construction of the connection determines how and if a limb can move, let’s focus on the arm for example.
In Ragdoll, we can model the geometry in the same way which would make both limits and the need for overlap readily apparent. But because it’s tedious, and not necessarily useful for collisions, Ragdoll enables you to skip this step and act as though this is what it looked like under the hood.
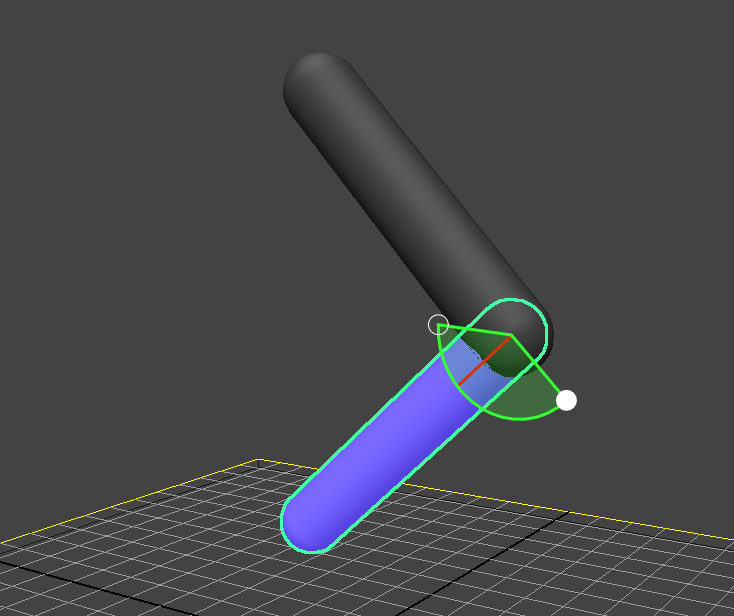
You’ve now saved the time and effort involved in modeling things like this robot here, but you are still bound by the exact same laws of physics.
In the case of your character, here’s how Ragdoll expects limbs to connect.
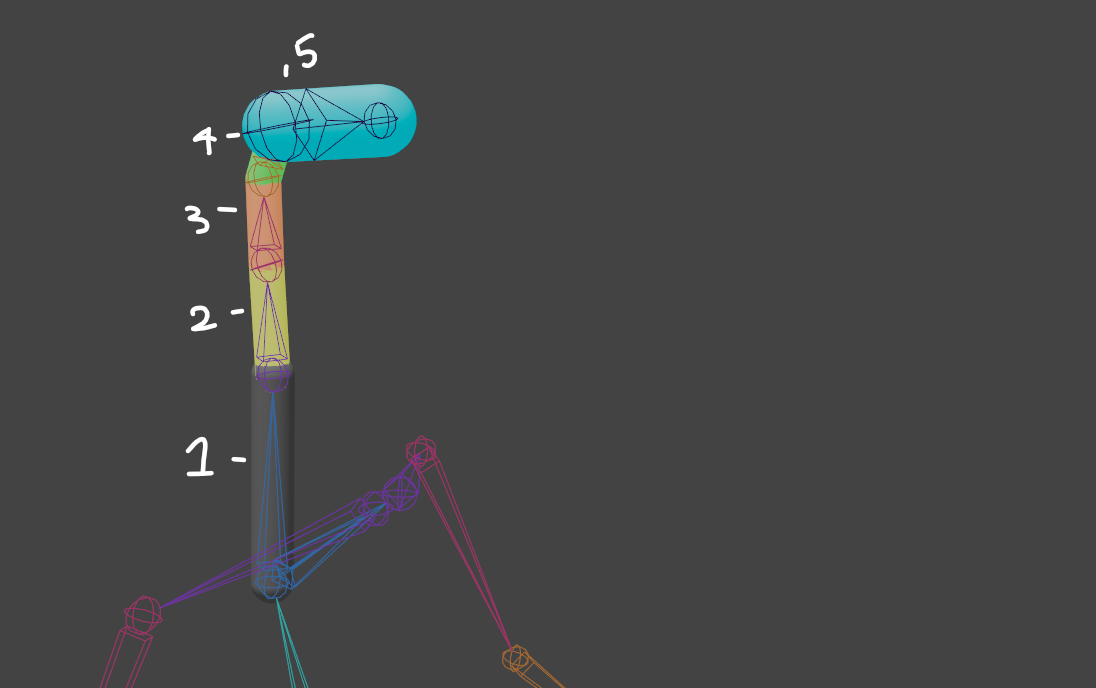
Where 2 overlaps with 1, 3 overlaps with 2, and so forth. Just like in the case of that robot. But instead:

2 does overlap with 1, but then 3 does not overlap with 2 - instead there is a large gap between them. This cannot exist in reality; think of the physical robot above and how you would manufacture this limb.
Then 4 is especially troubling, because although 4 does overlap with 3, it also overlaps with 2 and 1. This has no connection to reality anymore, it simply cannot exist and Ragdoll cannot know what to do with this.
In these scenarios, it’s perfectly fine to only include 1 and 3, skipping 2 and 4 entirely, depending on around which pivot you would like Ragdoll to rotate the head.
Hope it helps!