Got a question recently about when stiffness stops having any noticeable effect, and figure I’d share the answer. Ideally, it would be more obvious why but these are things that are difficult to make visual in the viewport and make tutorials for.
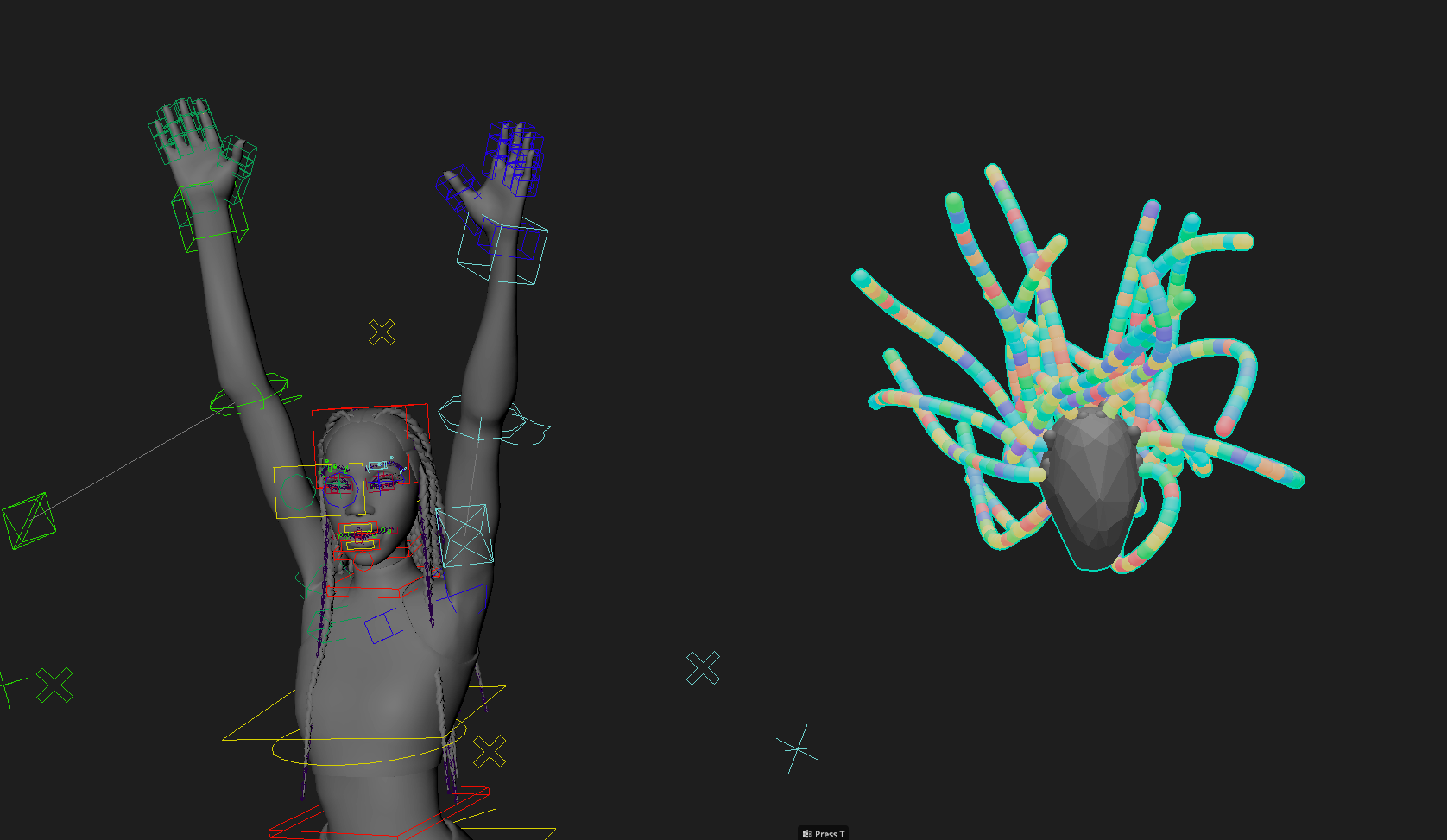
Here’s what they were seeing.
See how stiffness has some effect, but certainly not in proportion to the different amounts?
The reason this happens is because there is a ceiling to how high stiffness can go. That ceiling is determined by the number of Substeps and Iterations on the solver node.
- With default values, that ceiling is around 10-100
- Double the substeps and iterations, and the ceiling is around 100-1000
The reason I can’t say it’s exactly 100 or 1000 is because there is one more factor, and which is the number of constraints in the system. And by “constraints” I include the connection between markers but also the number of contacts; these are all the same mechanism internally.
The way to think about the Iterations attribute is as a total sum of available computations Ragdoll will spend solving your simulation, and they are divided semi-equally amongst each Marker.
With double the amount of markers, each of them get half the number of time spent on each one.
The Substsps attribute splits each frame into multiple smaller frames. It essentially makes your animation go in slow-motion internally, which makes it less challenging to figure out when things come into contact. There is a limit to how high this can go as well, as the slower something goes the close things get to the floating-point limit of the numbers Ragdoll uses to solve your simulation.
Beyond 8 Substeps and 8 Iterations is normally of no use, although in rare occasions I have seen 12-16 have at least some difference.
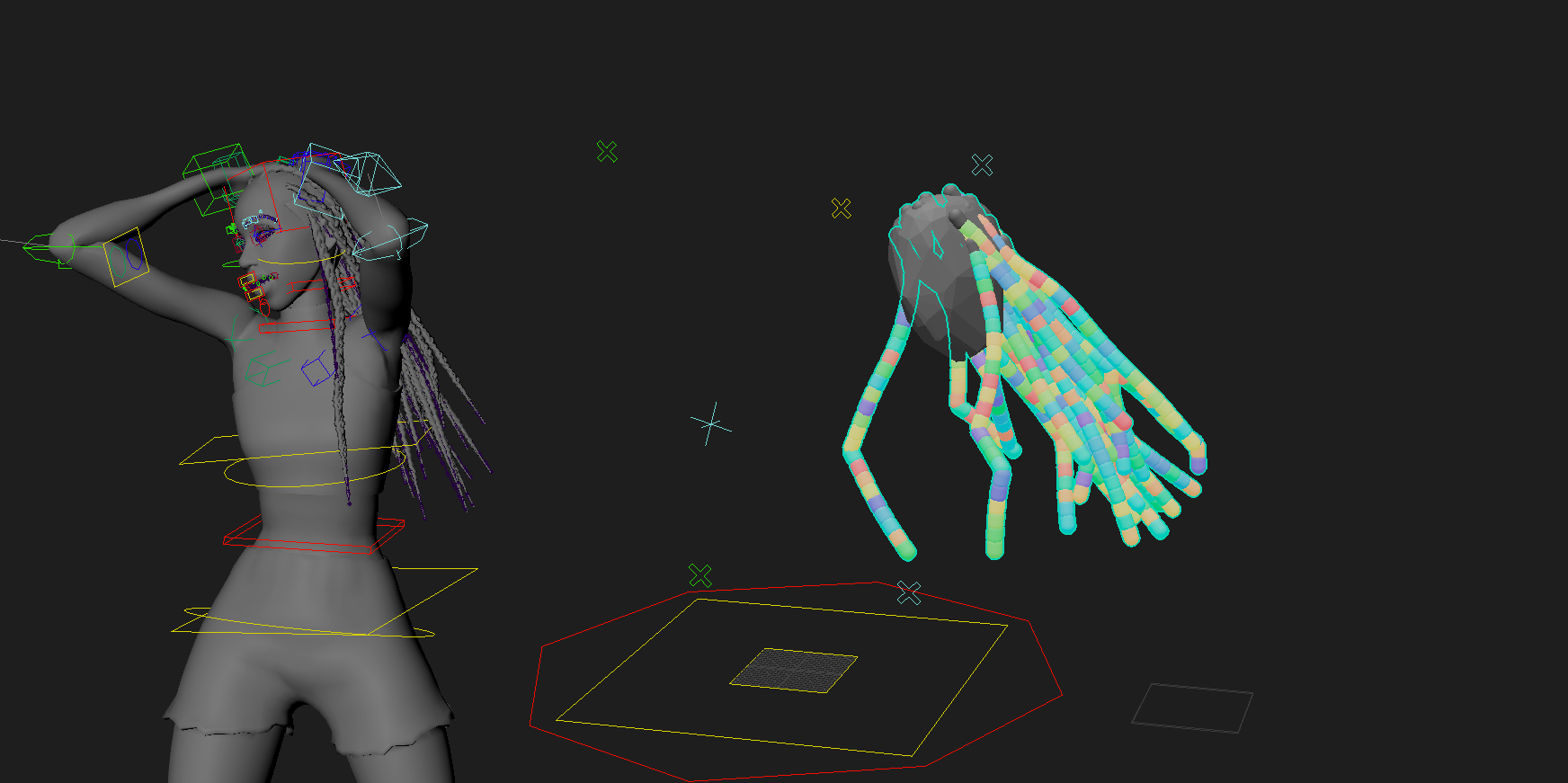
There’s one more thing about this scene in particular that makes a big difference, and that’s the shapes; in this case, these long thin shapes are the hardest to stiffen up. Double radius and you will see a much stronger effect.
Think of Stiffness as being the strength of a physical motor, sitting between each marker. The Stiffness determines how strong this motor is. But for a very thin shape, that motor will also be very tiny. Such a tiny motor would need to be significantly stronger to keep up. Another way to think about it is like cycling on a bike with really really small wheels.